Расчетные нагрузки и их комбинации для определения усилий на элементы металлических конструкций портальных кранов по методу допускаемых напряжений
| Показатели | Расчет на сопротивление усталости | Расчет на прочность и устойчивость | |||||||||
| Первый случай нагружения | Второй случай нагружения | Третий случай нагружения | |||||||||
| Комбинации нагрузок | |||||||||||
| I a | I b1 | I b2 | I c | I d | II a | II b1 | II b2 | II c | II d | III | |
| Вес поворотной части Вес неповоротной части Вес груза с грузозахватом Коэффициент динамичности Угол отклонения канатов от вертикали Коэффициент толчков Касательные и центробежные силы инерции при пуске и торможении механизма вращения Силы инерции при пуске и торможении механизма изменения вылета Силы инерции при пуске и торможении механизма передвижения Ветровая нагрузка | GП GH GЭ yI - - - - - - | GП GH GЭ - aI - - 0,5FИ.В - - | GП GH GЭ - aI - - 0,5FИ.В - - | GП GH GЭ - bI - 0,5 FИ.К, 0,5 FИ.Ц - - - | GП GH GЗ - 0,5aI kT =1,1 - - 0,5FИ.П - | GП GH G yП aK - - - - - | GП GH G - aII - - FИ.В - - | GП GH G - aII - - FИ.В - - | GП GH G - bII - FИ.К, FИ.Ц - - - | GП GH GЗ - aII kT =1,2 - - FИ.П - | GП GH GЗ - - - - - - РВШ |
| Примечания. 1. Комбинации нагрузок: Iа, IIа – работает только механизм подъема; I b1, I b2, II b1, II b2 – работает только механизм изменения вылета; I c, II c – работает только механизм вращения; I d, II d – работает только механизм передвижения. 2. aК=6° – угол косого подъема. 3. aI, a II – углы отклонения грузовых канатов в плоскости стреловой системы в сторону увеличения вылета; -aI, -aII – то же в сторону уменьшения вылета. 4. GЗ – вес грузозахвата. 5. GЭ=jЭG. |
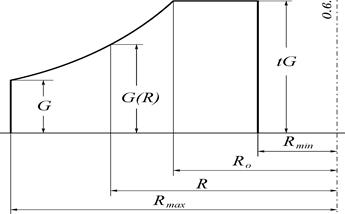
Рис. 1.14 График изменения веса груза по вылету
 (1.1)
(1.1)
где G, G(R) – cоответственно допустимые веса грузов на наибольшем вылете Rmax и текущем вылете R; Rmin и Ro – соответственно наименьший вылет и вылет, соответствующий узловой точке грузовой характеристики.
Обычно t = Ro / Rmax ~ 1,25, тогда Ro = 0,625Rmax при t = 2; Ro = 0,5Rmax при t =2,5.
Коэффициенты динамичности YI и YII при работе механизма подъема вычисляют в зависимости от масс груза, жесткостей канатов и элементов крана и скорости подъема. В предварительных расчетах их принимают по данным, приведенным в табл. 1.2. Расчетные углы отклонения канатов от вертикали в плоскости качания стрелы (aI и aII) и в перпендикулярной ей плоскости (bI и bII) соответственно для случаев работы механизмов изменения вылета и вращения принимают по данным испытаний портальных кранов в соответствии с табл. 1.2. Для выбора двигателей используют иные значения углов отклонения канатов от вертикали (табл. 1.2).
Силы инерции определяют по формулам вида Fиi = mi ai, где mi – ускоряемая масса, ai – ускорение, вычисляемое в зависимости от времени неустановившегося движения. Ветровую нагрузку определяют по ГОСТ 1451 и учитывают при выборе двигателей (ветровая нагрузка рабочего состояния) и прочностных расчетах (ветровая нагрузка нерабочего состояния). При расчете на прочность рассматриваются различные комбинации нагрузок, вылеты, углы поворота стрелы, чтобы выявить наихудшее нагружение.
Таблица 1.2
Коэффициенты динамичности y при подъеме груза и углов a и b отклонения канатов от вертикали для портальных кранов
| Тип портального крана (группа режима его работы | Случаи нагружения | Для расчета мощности двигателей | ||||||
| Первый | Второй | |||||||
| yI | aI | bI | yII | aII | bII | aд | bд | |
| Грейферный (8К) | 1,4 | 6,5 | 5,5 | 1,6 | 5,5 | |||
| Крюковой (6К, 7К) | 1,3 | 4,5 | 1,5 | 13,5 | 4,5 | |||
| Монтажный | - | - | - | 1,3 |
Расчет на сопротивление усталости в металлических конструкциях перегрузочных кранов выполняют при эквивалентных нагрузках. Коэффициенты эквивалентности jЭ принимают равными 1,0 для грейферных кранов (с учетом возможного переполнения грейфера) и 0,85 для крюковых. Расчет по эквивалентным нагрузкам строится как расчет при нестационарном нагружении с учетом распределения вылетов взятия груза, варианта работы (судно — судно, судно — склад и т.д.), определяющего последовательность рабочих движений и т.д.
Внешние нагрузки, обусловленные ими усилия на элементы крана и вызываемые ими напряжения являются непрерывными нестационарными случайными и зависят от ряда случайных факторов: веса грузов, пусковых и тормозных моментов, последовательности и частоты включений механизмов, скорости и направления ветра, варианта работы и т.д. В связи с этим разработаны системные методы расчетов на прочность, сопротивление усталости и надежность узлов и деталей перегрузочных кранов [4], базирующиеся на вероятностном статистическом исследовании нагрузок в эксплуатации. Установлено, в частности, что параметры распределения внешних нагрузок, усилий в шарнирах стрелового устройства, опорных давлений порталов грейферных кранов могут быть аппроксимированы нормальными законами.
1.2.5. Расчет давлений на опоры порталов
От величин давления опор портала на рельсы зависит конструкция, а следовательно, и стоимость подкрановых путей, которая обычно вполне сопоставима со стоимостью установленных на этих путях кранов. Давления на опоры портала являются также объективным критерием при оценке совершенства конструкции крана, так как при одинаковых массе и грузовом моменте различных кранов их значения могут различаться в значительных пределах.
На рис. 1.15,а представлена расчетная схема крана.
|
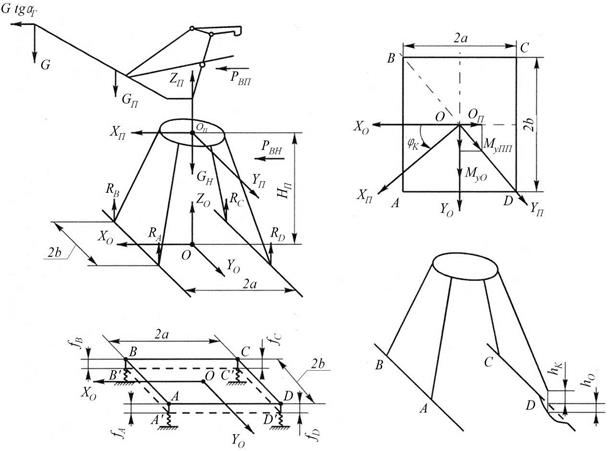
Рис. 1.15. Схемы к расчету давлений на опоры порталов.
Расстояние между плоскостями XO O YO и XП OП YП обозначим через НП. В начальном положении направления соответствующих осей координат обеих систем совпадают; стреловая система крана лежит в плоскости XП OП ZП.
Расчет ведется по второму случаю нагружения для комбинаций нагрузок II а и II b1 (см. табл. 1.1) с дополнительным учетом ветра рабочего состояния и по третьему случаю нагружения для различных положений стрелы. Введем следующие допущения; 1) конструкция портала считается абсолютно жесткой; 2) рельсы лежат в одной горизонтальной плоскости (погрешности укладки путей не учитываются); 3) до нагружения портал опирается на рельсы во всех четырех точках (все опоры имеют одинаковую высоту); 4) рельсовый путь под всеми опорами имеет одинаковую вертикальную податливость.
Раздельно для поворотной в системе XП YП ZПи неповоротной в системе ХO YO ZO частей крана определяются проекции главных векторов  и
и  и главных моментов
и главных моментов  и
и  на оси координат:
на оси координат:
 (1.2)
(1.2)
где xi, yi, zi – координаты точек приложения сил Fi в соответствующей системе координат. Напомним, что положительное направление момента относительно оси — против часовой стрелки, если смотреть с положительного направления оси.
Проекции главного вектора  и главного момента
и главного момента  для всего крана в системе XO YO ZO для произвольного угла jK поворота стрелы определяются (см. рис. 1.15,б):
для всего крана в системе XO YO ZO для произвольного угла jK поворота стрелы определяются (см. рис. 1.15,б):
 (1.3)
(1.3)
где GК и G — соответственно вес крана и груза.
При использовании формул (1.3) надо иметь в виду, что ветровую нагрузку на неповоротную часть крана следует определять в плоскости стреловой системы. Для крана с учетом того, что горизонтальные силы на поворотную часть крана действуют в плоскости стреловой системы, а вертикальные нагрузки - весовые, значения Vyпп, Mzон и Mzпп равны:
VYПП = 0, Mxпп = 0, Mzон = Mzпп = 0.(1.4)
С учетом (1.4) нагрузки Vz0, Mxo и Myo для определения давлений на опоры портала равны
Vz0 = – GK – G, Mxo = Mxoн – (Myпп + Vхпп HП) sinjK,
Myo = Myoн + (Myпп + Vxпп HП ) cosjK. (1.5)
Для нахождения опорных реакций RA,RВ,RС, RD имеется только три уравнения равновесия (в остальные реакции не входят):
 (1.6)
(1.6)
где a и b – соответственно половина колеи и базы портала (см. рис. 1.15).
Проекции главных векторов сил V и момента М на оси координат определяются по зависимостям вида
Таким образом, задача один раз статически неопределима. Для составления дополнительного уравнения совместности деформаций используем допущения о жесткости портала и равной податливости плоского рельсового пути под всеми опорами. Под действием давлений на опоры, противоположных соответствующим реакциям, точки A, B, C, D переместятся в положения A1 , B1, C1, D1 (рис. 1.15,в), причем в силу абсолютной жесткости портала фигура A1, B1, C1, D1 останется плоской, т.е. сохранится попарная параллельность противоположных сторон опорного контура —A1 D1 // B1 C1. Данное утверждение можно записать в виде равенства
(fA - fD ) / 2a = (fB – fС) / 2a (1.7)
Величины просадок опор fA, B, C, D = RA, B, C, D / cо, где cо – коэффициент жесткости основания. Подставляя эти величины в (1.7), получим дополнительное уравнение
RA + RC = RB + RD. (1.8)
Рассматривая совместно уравнения (1.8) и первое из (1.6), найдем следующее уравнение:
RA + RC = RB + RD = 0,5 (GK + G). (1.9)
Таким образом, для жесткого портала сумма давлений на диагональные опоры не зависит от угла jK поворота стрелы. Решая системы уравнений (1.6) и (1.9), можно определить реакции в опорах по формулам:
 (1.10)
(1.10)
Давление на опору А имеет максимальное значение при jK = jKO, определяемое из условия dRA /djK = 0. Тогда с учетом соотношений (1.5) и (1.10) tgjKO = a/b, т.е. при расположении поворотной части перпендикулярно диагонали DB опорного контура (см. рис. 1.15,б).
На практике рельсовый путь не является строго плоским, т.е. имеется погрешность укладки hO (см. рис. 1.15,г). Для неидеально изготовленного портала имеется погрешность hK. Таким образом, невесомый и ненагруженный портал, вообще говоря, имеет три точки опоры, а между четвертой опорой и рельсом есть зазор h = hO+ hK. Если приложить к порталу возрастающую нагрузку в вертикальной плоскости, то величина зазора h по мере увеличения нагрузки будет уменьшаться вследствие деформаций портала и основания и четвертая опора вступит в работу лишь после достижения нагрузкой определенного значения. После этого опорные давления будут отличаться от получающихся по формулам (1.10).
Влияние погрешностей изготовления крана и основания на опорные давления можно учесть достаточно точно, если вычислять их по формулам вида
R = RЖ ± c h, (1.11)
где RЖ определяют по выражениям (1.10); c – приведенная жесткость портала и основания, определяемая из выражения
1/с = 1/сK + 1/сO ; (1.12)
h = hO + hK. (1.13)
Знак «минус» в формуле (1.11) действителен для двух диагональных опор, под одной из которых имеется зазор (опоры B и D на рис. 1.15,г), знак «плюс» — для двух других опор А и С.
Для серийно выпускаемых кранов, когда тип основания не оговорен в задании на проектирование, жесткость основания сO в (1.12) следует принять бесконечной, что достаточно близко отвечает железобетонному основанию; тогда приведенная жесткость c = cK. Значения податливостей рельсовых наземных путей кранов приведены в литературе [14].
В формуле (1.13) погрешность крана hK значительна при индивидуальном изготовлении опор и пренебрежимо мала, если технология изготовления опор обеспечивает их взаимозаменяемость (механообработка опор после сварки или сварка в приспособлениях).
При назначении погрешности hO основания надо иметь в виду следующее. Согласно «Правилам устройства и безопасной эксплуатации грузоподъемных кранов» [12], для портальных кранов разность отметок головок рельсов в одном поперечном сечении не должна быть более 40 мм, разность отметок головок рельсов на длине 10 м рельсового пути — не более 20 мм. Измерения показывают, что распределение hО хорошо описывается нормальным законом при математическом ожидании, равном нулю, и при среднеквадратическом отклонении, равном 8…13 мм для железобетонного основания и 18…22 мм для шпального. При балансирной системе колес механизма передвижения (см. рис. 1.19) расчетные значения hО уменьшаются.
Рамно-башенные и рамные двухстоечные порталы (см. рис. 1.8, 1.9) имеют большую вертикальную податливость. Как показывают расчеты, для них добавка cKhO к опорному давлению при h < 40 мм не превышает 5 % этой величины, расчитанной по формулам (1.10). Четырехстоечные порталы кранов на поворотном круге (см. рис. 1.8,а) и особенно кранов на колонне с крестообразным ригелем (см. рис. 1.9,а) имеют значительную вертикальную жесткость, и поэтому для них давление на опоры необходимо определять по формуле (1.11).
Из выражений (1.10) и (1.11) следует, что сумма давлений на наименее нагруженные смежные опоры не зависит от погрешностей укладки пути и изготовления крана и определяется по зависимости вида
а минимальная сумма давлений на диагональные опоры RB + RD = = 0,5 (GK + G) – 2ch не зависит от положения поворотной части крана и действия горизонтальных сил.
Трехопорные порталы являются статически определимыми и погрешности изготовления путей и крана не влияют на величину опорных давлений. Последние можно получить из уравнений равновесия вида (1.6); после чего определяются положения поворотной части крана, при которых опорные давления будут максимальными.
Горизонтальные давления, которые испытывают опоры поворотных кранов, могут быть направлены как вдоль, так и поперек пути. Они обусловлены действием горизонтальных сил (давления ветра PВ, сил инерции FИ и отклонения грузовых канатов), а также момента при работе механизма вращения крана. Величина горизонтальных сил вдоль пути ограничивается силой сцепления приводных колес с рельсами. Специфической нагрузкой портала является распор [12,19].
Дата добавления: 2015-02-19; просмотров: 4058;