Механизмы вращения
1.5.1. Общая характеристика и параметры
|
|
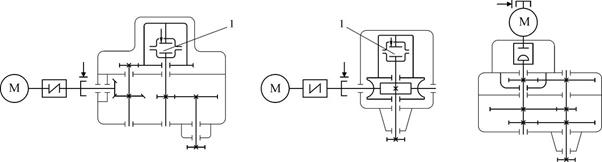
Рис. 1.25. Кинематические схемы механизмов вращения крана: а, б – с горизонтальным расположением двигателя, в – с вертикальным расположением двигателя;
1 – муфта предельного момента
Механизмы вращения с вертикальным расположением двигателя (фланцевого, со встроенным тормозом) более компактны, позволяют избежать конических, червячных и других передач, имеющих малую надежность или низкий КПД, проще в обслуживании и легче.
Механизмы вращения крана располагаются, как правило, на поворотной части и выполняются с зубчатым или цевочным зацеплением. Зацепление может быть внутренним или внешним, последнее более удобно для осмотра и ремонта. Большинство механизмов вращения однодвигательные. При больших массах крана ставят несколько механизмов вращения при общем венце. Это обеспечивает широкую унификацию механизмов, но возникает проблема распределения нагрузок между приводами, которую пытаются решить установкой редукторов на пружинных амортизаторах.
Согласно правилам [12], на механизмах вращения портальных кранов допускается установка управляемых тормозов нормально открытого типа. В этом случае тормоз должен иметь устройство для фиксации его в закрытом положении. Такое устройство может быть установлено на рычагах или педалях управления тормозом.
Пример конструкции управляемого нормально открытого тормоза механизма вращения крана представлен на рис. 1.26. Тормоз 1 имеет тягу 2 и рычаг 3, один конец которого соединяется с тягой, а к другому концу через натяжное устройство 4 крепится канат 5, связанный через отклоняющие блоки 6, 9, 10 с тягой 16. Управление тормозом механизма вращения производится при помощи педали 15. При нажатии на педаль тяга 16 потянет канат 5, второй конец которого закреплен на рычаге 3. Рычаг повернется и через тягу 2 замкнет тормоз 1. Прежде чем тормоз замкнется, кулачок 13 повернется и выключит конечный выключатель 12. Когда крановщик снимет ногу с педали, пружина 11 вернет всю систему в исходное положение, а пружина 7 выберет слабину каната 5 и разомкнет тормоз. Для регулировки усилия пружины 7 левый конец ее может устанавливаться в одно из трех отверстий, предусмотренных в листе 8, приваренном к основанию тормоза.
Выключатель 12 не должен допускать замыкания тормоза при работающем двигателе в том случае, если крановщик начнет торможение, не поставив предварительно рукоятку командоконтроллера в нулевое положение. Стопорное устройство 14 предназначено для затормаживания поворотной части крана при уходе крановщика.
Для кранов, работающих в районах с повышенной ветровой нагрузкой (динамическое давление ветра в нерабочем состоянии более 700 Па), в конструкциях АО «Подъемтрансмаш» предусматривается стопорение поворотной части крана относительно портала для предотвращения свободного поворота стрелы под действием ветра и ее удара о соседние краны и строения.
Рис. 1.26. Управляемый нормально открытый тормоз механизма вращения, объяснения см. в тексте
Для удобства установки поворотной части на стопоре предусмотрены указатели, один из которых размещен в кабине управления, а другой на площадке портала. При установке поворотной части на стопор оси верхнего и нижнего указателей совмещают путем поворота верхнего строения крана. В рабочем положении стопора срабатывает конечный выключатель, что исключает возможность включения двигателя механизма вращения при застопоренной поворотной части.
1.5.2. Особенности расчета
При работе механизма вращения портальных кранов подвешенный на канатах груз отклоняется как в плоскости, так и из плоскости стреловой системы крана, что создает дополнительные нагрузки на конструкцию крана и привод механизма. Рассмотрим вопрос об определении максимальных углов отклонения грузовых канатов при работе механизма вращения крана на стадии проектировочного расчета.
На рис. 1.27 представлена динамическая модель портального крана с подвешенным на канате грузом массой mГ.
 Рис. 1.27. Динамическая модель стрелового крана с подвешенным на канатах грузом при работе механизма вращения
Рис. 1.27. Динамическая модель стрелового крана с подвешенным на канатах грузом при работе механизма вращения
|
Введена неподвижная система правых декартовых координат XKYK ZK, ось OK ZK которой направлена по оси вращения крана. В положении равновесия стрела крана направлена по оси OKYK. С концом стрелы связана правая система координат XГYГ ZГ таким образом, чтобы стрела была направлена по оси OГYГ, а направления осей OГ ZГ и OК ZК совпадали. Плоскость XК OКYК отстоит от конца стрелы на расстоянии длины подвеса груза Н. Груз на канатах рассматривается как математический маятник.
В качестве независимых обобщенных координат примем угол jК поворота стрелы крана и отклонения груза от положения равновесия в плоскости стреловой системы yГ и в плоскости, перпендикулярной стреловой системе xГ.
Используя уравнения Лагранжа второго рода, получим систему нелинейных дифференциальных уравнений, описывающих процесс вращения крана с подвешенным на канате грузом в виде:
(JK + mГ (  +(
+(  +yГ)2)
+yГ)2)  –mГ ( +yГ)
–mГ ( +yГ)  +mГ xГ
+mГ xГ  +2 mГ
+2 mГ  =
=
=MД – MСТ ,
– mГ ( +yГ) + mГ +bX  –2 mГ +(cX – mГ
–2 mГ +(cX – mГ  )
)  =0,
=0,
mГ xГ + mГ +2 mГ  + bY
+ bY  +(cY – mГ )
+(cY – mГ )  – mГ =0,
– mГ =0,
где JK — момент инерции поворотной части крана; r — вылет стрелы крана; МД и МСТ — cоответственно силовая характеристика привода механизма вращения и момент статического сопротивления вращению; bX и bY — соответственно коэффициенты сопротивления при колебаниях груза по координатам xг и yг; сх и сy — коэффициенты жесткости при поперечных колебаниях груза, которые для математического маятника определяются по выражению
сх = cy = G / H, (1.19)
где G – вес груза.
Для определения максимальных отклонений груза xГ и yГ будем полагать, что ускорение jК при вращении крана изменяется по закону:
 , (1.20)
, (1.20)
где wН – номинальная частота вращения крана; tН – время неустановившегося движения.
Пренебрегая затуханием колебаний и нелинейными членами, уравнение движения для определения xг из системы (1.18) можно представить в виде
 (1.21)
(1.21)
где l2 = g / H – квадрат частоты собственных колебаний.
Решая уравнение (1.21) при нулевых начальных условиях, найдем
 (1.22)
(1.22)
откуда
 (1.23)
(1.23)
где T = 2  /
/ 
 2
2  – период собственных колебаний.
– период собственных колебаний.
Если tн > 0,5 T, т.е. xг не достигло максимальной величины, следует рассмотреть второй этап движения с jк = 0 при t > tН.
Уравнение движения в этом случае будет иметь вид
xг+ l2 xг= 0.
Решая его при начальных условиях, полученных из выражений (1.22) при t = tН найдем наибольшее значение координаты из выражения

Так как угол отклонения канатов bг = xг/H, то окончательно получим его по формуле
 (1.24)
(1.24)
При разгоне и торможении выражения для bг будут одинаковыми, изменится только знак перед . Выражение (1.24) можно использовать и для определения углов отклонения канатов при работе механизма изменения вылета и передвижения, подставляя вместо  линейное ускорение.
линейное ускорение.
Для определения yг уравнение движения из системы (1.18) при пренебрежении затуханием колебаний и нелинейными членами можно представить в виде
 (1.25)
(1.25)
Угловая частота вращения крана при разгоне изменяется по зависимости
 . (1.26)
. (1.26)
Решая уравнение (1.25) при нулевых начальных условиях, получим из выражения
 . (1.27)
. (1.27)
После окончания времени разгона, при t > tн, уравнение движения (1.25) в соответствии с (1.26) будет иметь вид
 .
.
Решая его при начальных условиях, полученных из (1.27) при t = tН, и учитывая, что aГ = yГ / H, найдем наибольший угол отклонения грузовых канатов по формуле
 (1.28)
(1.28)
где коэффициент Ky определяется из выражения
 ,
,  .
.
На рис. 1.28 представлен график зависимости коэффициента Ky от отношения  . Чем выше длина подвеса груза Н, тем меньше коэффициент Кy, а следовательно, и угол отклонения грузовых канатов aгmax при работе механизма вращения груза.
. Чем выше длина подвеса груза Н, тем меньше коэффициент Кy, а следовательно, и угол отклонения грузовых канатов aгmax при работе механизма вращения груза.
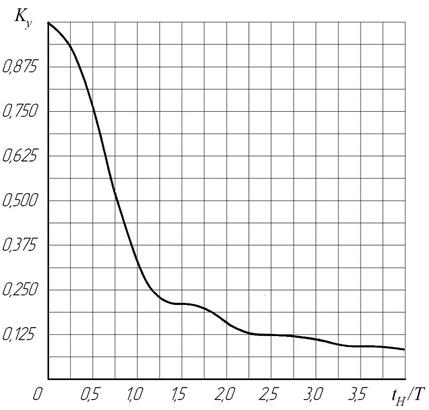 Рис. 1.28. График зависимости коэффициента Кy от отношения tн / Т
Рис. 1.28. График зависимости коэффициента Кy от отношения tн / Т
|
Последовательность расчета механизмов вращения стреловых кранов дается в общем курсе грузоподъемных машин [1]. Для портальных кранов дополнительно следует учитывать углы отклонений канатов aг и bг.
Дата добавления: 2015-02-19; просмотров: 4767;