Общая характеристика и параметры. Можно выделить три принципа формирования структуры СС и соответственно три способа обеспечения движения груза при изменении вылета по близкой к горизонтали
Можно выделить три принципа формирования структуры СС и соответственно три способа обеспечения движения груза при изменении вылета по близкой к горизонтали траектории:
1) прямые стрелы с переменной длиной подвеса груза Н (рис. 1.35,а). При уменьшении вылета одновременно с подъемом точки ОС подвеса груз опускается на канатах относительно точки подвеса;
2) шарнирно-сочлененные стрелы с постоянной длиной подвеса груза Н (рис. 1.35,б), представляющие собой шарнирный механизм, в котором точка ОС подвеса груза при изменении вылета перемещается по малоуклоняющейся от горизонтали траектории, а грузовые канаты идут вдоль элементов стрелового устройства. Траектория груза эквидистантна траектории точки подвеса груза;
3) шарнирно-сочлененные стрелы с переменной длиной подвеса груза (рис. 1.35,в).
Для большинства стреловых устройств портальных кранов горизонтальная траектория груза принципиально может быть обеспечена лишь приближенно. При движении груза по наклонной траектории вызываемые весом G груза усилия, действующие на стрелу, создают момент относительно оси ее качания, называемый грузовым неуравновешенным моментом. Как будет показано, во многих случаях эти усилия приводятся к одной силе R (R1, R2 или R3, рис. 1.35,а) в вершине стрелы, и тогда грузовой неуравновешенный момент MG равен произведению силы R на ее плечо относительно корня стрелы r: MG = R r. При указанном на рис. 1.35,а положительном направлении угла jС момент МG положителен, если действует в сторону увеличения вылета стрелы.
|
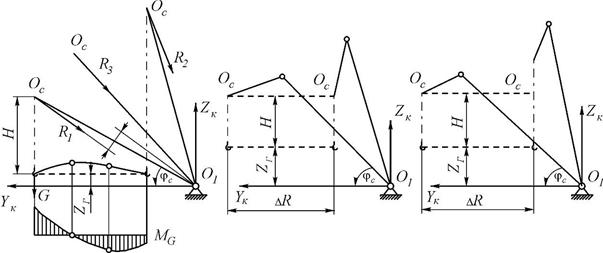
Рис. 1.35. Схемы стреловых устройств: а – прямая стрела; б – шарнирно-сочлененная стрела с постоянной длиной подвеса груза; в – шарнирно-сочлененная стрела с переменной длиной подвеса груза
Если стреле придать малое угловое перемещение djС, то ему будет соответствовать малое перемещение груза по вертикали dzг. Из уравнения элементарных работ МG djc = – G dzг. Заменяя приращения функций их дифференциалами, найдем МG по зависимости вида
 (1.29)
(1.29)
где r – текущее значение вылета.
Таким образом, грузовой неуравновешенный момент МG пропорционален тангенсу угла, образуемого касательной к траектории груза с горизонтальной осью О1 YК.
На рис. 1.35,а и 1.36 показаны траектории движения груза и соответствующие им кривые грузового неуравновешенного момента МG. Экстремумам траектории соответствуют нулевые значения МG. Если при уменьшении вылета происходит подъем груза, то двигатель механизма изменения вылета должен преодолевать грузовой неуравновешенный момент.
|
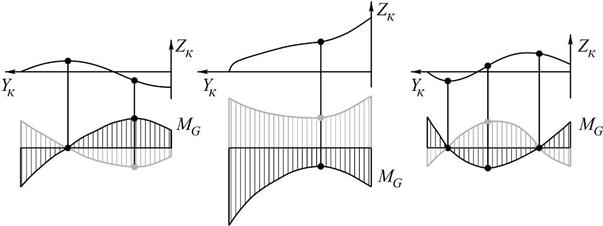
Рис. 1.36. Траектории груза zГ = f(yК) и кривые грузового неуравновешенного момента MG = f(yК)
Согласно техническим условиям на портальные краны АО «Подъемтрансмаш», отклонение траектории груза от горизонтали при изменении вылета допустимо не более чем на 15 % диапазона DR изменения вылета. Осуществленные стреловые устройства портальных кранов обеспечивают это отклонение в пределах (0,01…0,04) DR.
Дата добавления: 2015-02-19; просмотров: 2911;