Прямые стрелы с уравнительным полиспастом
Схема прямой стрелы с уравнительным полиспастом представлена на рис. 1.37. Грузовой канат идет от барабана механизма подъема и образует уравнительный полиспаст кратностью uУР между блоками О2 на колонне крана и ОС на конце стрелы, а далее направляется в грузовой полиспаст кратностью uПОЛ и крепится на стреле (при четных uПОЛ) или на подвеске (при нечетных uПОЛ) (рис. 1.59). При изменении вылета, когда механизм подъема не работает, длины грузового Н и уравнительного lК полиспастов изменяются в противоположных направлениях, что позволяет обеспечить траекторию груза, близкую к горизонтальной прямой. Грузовой неуравновешенный момент МG = – R r (рис. 1.35).
При кинематическом и силовом анализе стреловых систем удобно пользоваться выражениями для кинематических передаточных функций первого порядка (аналогов передаточных отношений). Одна из основных функций любого механизма – воспроизведение заданных движений, точная реализация которых была бы возможна лишь в таком абстрактном механизме, в котором звенья не деформируются, отсутствуют зазоры и погрешности изготовления. Если такой механизм имеет одну степень свободы, то положение любого звена однозначно определяется координатой (угловой или линейной) ведущего звена.
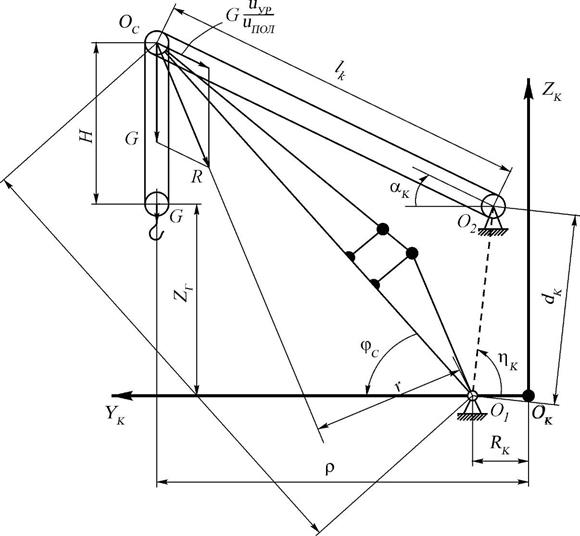
Рис. 1.37. Схема прямой стрелы с уравнительным полиспастом
Функцией положения (кинематической передаточной функцией нулевого порядка) в механизмах с одной степенью свободы называется функциональная зависимость между обобщенными координатами (угловыми или линейными) выходного и входного звеньев. Первая производная функции положения по обобщенной координате называется кинематической передаточной функцией первого порядка, вторая производная — кинематической передаточной функцией второго порядка и т.д. Кинематические передаточные функции первого и далее порядков могут быть безразмерными, а могут иметь размерности длины или длины в минус первой степени.
Кинематические передаточные функции (КПФ) не зависят от закона движения входного звена и являются собственными характеристиками механизма, так как при данном значении обобщенной координаты они зависят только от параметров кинематической схемы. Если КПФ первого порядка механизма величина постоянная, то такие механизмы называются механизмами с линейной функцией положения (например, зубчатые механизмы с постоянным передаточным отношением), в противном случае — механизмами с нелинейной функцией положения.
Рассмотрим стреловое устройство с канатом, показанное на рис. 1.37, как механизм с одной степенью свободы. За обобщенную координату примем угол jС наклона стрелы, положительное направление которого показано на рис. 1.37. Связь между углом наклона стрелы jС и вылетом крана r, находящимся в диапазоне Rmax £ r £ Rmin, задается зависимостью
r=RK + lC cosjC. (1.30)
Координата ZГцентра масс груза определяется по зависимости вида
ZГ = lC sinjC – H,(1.31)
где Н – длина подвеса груза,
Н = НO + НПЕР,(1.32)
гдеНO – начальная длина подвеса груза, НПЕР — изменение длины подвеса груза за счет перекатывания грузовых канатов при работе механизма изменения вылета.
Величину НПЕР для прямой стрелы с уравнительным полиспастом по схеме на рис. 1.37 найдем из следующих соображений. При неработающем механизме подъема общая длина LК грузового каната остается постоянной и может быть записано равенство
LК = (HO + HПЕР) uПОЛ + lК uУР (1.33)
где lК—длина уравнительного полиспаста. Продифференцировав по времени равенство (1.33), получим

Введем в рассмотрение КПФ uK , определяемое по формуле
 (1.34)
(1.34)
Из треугольника О1 О2 ОC на рис. 1.33 найдем lК в виде
 (1.35)
(1.35)
На основании анализа формулы (1.31) с учетом выражений (1.32) и (1.35) следует сделать вывод, что для прямых стрел с уравнительным полиспастом принципиально невозможно получить одно и то же значение ZГ на всех вылетах (при любом угле jC), поскольку слагаемые в формуле (1.31) изменяются по качественно разным законам. Возможно лишь приближенное выполнение условия ZГ = const.
Дифференцируя по времени соотношение (1.35), получим
uК = – uУР lС dК sin(jС + hК) / uПОЛ lК, (1.36)
где lK определяется по (1.35).
Введем в рассмотрение еще две КПФ первого порядка:
 (1.37)
(1.37)
 (1.38)
(1.38)
Здесь  и
и  представляют собой соответственно горизонтальную и вертикальную проекции абсолютной скорости конца стрелы (точки ОС) на соответствующие оси координат.
представляют собой соответственно горизонтальную и вертикальную проекции абсолютной скорости конца стрелы (точки ОС) на соответствующие оси координат.
Теперь в соответствии с (1.31) КПФ первого порядка
 (1.39)
(1.39)
Тогда в соответствии с (1.29) грузовой неуравновешенный момент
MG = G uG. (1.40)
Изменение кординаты ZГ в зависимости от угла наклона стрелы jС:
 (1.41)
(1.41)
где  – начальное значение координаты ZГ.
– начальное значение координаты ZГ.
Использование выражений для КПФ первого порядка значительно упрощает расчет системы изменения вылета портальных кранов, что особенно проявляется для кранов с шарнирно-сочлененной стреловой системой (см. далее), и позволяет эффективней использовать ЭВМ. Так, если к концу стрелы приложена сила Fa, то момент относительно корня стрелы этой силы Ma = Fa ur..
Определение параметров прямой стрелы с уравнительным полиспастом производится следующим образом. Длина стрелы lС определяется в зависимости от наибольшего вылета Rmax и высоты расположения конца стрелы над ее корнем на наибольшем вылете, указываемых в задании на проектирование. Отношение кратностей uУР / uПОЛ рекомендуется принимать равным трем. При меньших значениях нельзя получить удовлетворительную траекторию груза и кривую грузового неуравновешенного момента, а принятие отношения uУР / uПОЛ> 3нецелесообразно, поскольку улучшение траектории груза и кривой MG не окупается усложнением стрелового устройства. Таким образом, задача сводится к определению координат dKи h блока О2 (рис. 1.37).
Решение задачи зависит от критерия, принимаемого при оптимизации параметров стреловой системы. Если таким критерием считать отклонение DZГ траектории груза от горизонтали, то минимум DZГ достигается при равенстве друг другу ординат груза при наибольшем ZГ1 и наименьшем ZГ2вылетах [15]. Тогда на основании формул (1.31), (1.33), (1.35) можно записать соотношения
 , (1.42)
, (1.42)
где  и
и  — значения угла jС наклона стрелы на наибольшем Rmax и наименьшем Rmin вылетах.
— значения угла jС наклона стрелы на наибольшем Rmax и наименьшем Rmin вылетах.
Задаваясь значениями угла hК, можно найти значения dК, решая уравнение численно. Меньшее отклонение траектории DZГ получается при больших значениях угла hК; поскольку значения угла hК > 90◦ неконструктивны (наклон колонны в сторону увеличения вылета), наилучшим является hК =90◦.
Для качественного анализа положим jС1 = 0, jС2 = 90◦, hК = 90◦. Тогда уравнение (1.42) примет вид
 ,
,
откуда отношение  .
.
Если  , то
, то  ; если же
; если же  , то
, то  . Таким образом, применение уравнительного полиспаста обеспечивает равные ординаты груза на граничных вылетах при значительно меньшей высоте колонны.
. Таким образом, применение уравнительного полиспаста обеспечивает равные ординаты груза на граничных вылетах при значительно меньшей высоте колонны.
Более правильно при определении параметров прямой стрелы исходить из характеристик грузового неуравновешенного момента. Если момент МG во всем диапазоне изменения вылета имеет малые значения, то можно быть уверенным в приемлемости траектории груза; обратное утверждение не всегда справедливо. Грузовой неуравновешенный момент МG в соответствии с (1.40) пропорционален весу груза G и uG.КПФ uG для этого случая удобно представить в виде
 (1.43)
(1.43)
где aK– угол наклона оси канатов уравнительного полиспаста (см. рис.1.37).
Если принять на наибольшем вылете  ,а на наименьшем
,а на наименьшем  то получим два уравнения:
то получим два уравнения:

откуда определяются граничные по вылету значения углов  и
и  . Отвечающее им положение блоков О2 уравнительного полиспаста (значения dK и hK) находим из решения системы уравнений вида (1.43) или графическим путем [15].
. Отвечающее им положение блоков О2 уравнительного полиспаста (значения dK и hK) находим из решения системы уравнений вида (1.43) или графическим путем [15].
Менее распространенные конструкции прямых стрел с уравнительным полиспастом описаны в литературе [5].
Представляет интерес прямая стрела с разнесенными блоками уравнительного полиспаста (рис. 1.38), когда 2/3 блоков (при uУР / uПОЛ = 3) находятся на кронштейне О6, а одна треть на конце стрелы ОС.
Это позволяет обеспечить более конструктивную форму конца стрелы, что особенно важно для кранов большой грузоподъемности. В этом случае MG = R1 r1 – R2 r2. Грузовой неуравновешенный момент MG для прямых стрел по схеме на рис. 1.38 определяется по формуле (1.40), uG — по (1.39), uZ — по (1.38). Для определения КПФ первого порядка uК воспользуемся тем же методом, что и для прямых стрел с совмещенными блоками уравнительного полиспаста. В этом случае общая длина LК каната, запасованного в полиспасты (рис. 1.38), определяется по формуле
 . (1.44)
. (1.44)
Продифференцировав по времени соотношение (1.44), получим
 . (1.45)
. (1.45)
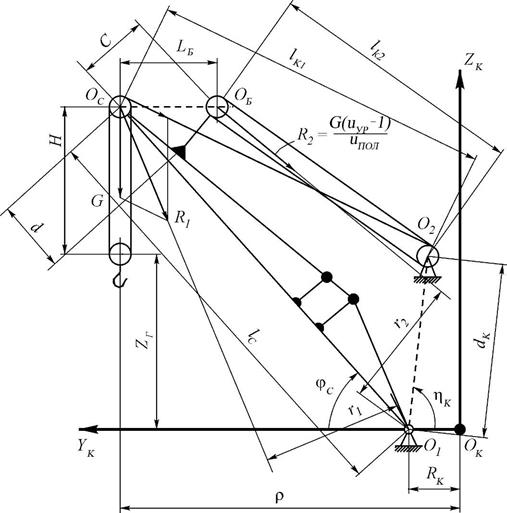
Рис. 1.38. Схема прямой стрелы с разнесенными блоками уравнительного
полиспаста
Величины  и
и  найдем в соответствии со схемой на рис. 1.34 в виде
найдем в соответствии со схемой на рис. 1.34 в виде
 , (1.46)
, (1.46)
где  ;
;  .
.
Используя выражения (1.45), (1.46), получим выражение для uК:
 (1.47)
(1.47)
Координаты оси О2 блоков для таких стрел в зависимости от характера грузового неуравновешенного момента определяются следующим образом. Длину стрелы lС назначают исходя из задания на проектирование (с учетом размещения груза под стрелой при минимальном вылете), кратность uПОЛгрузового полиспаста — в зависимости от грузоподъемности крана. Далее задаются кратностью уравнительного полиспаста и координатами си dблоков на стреле (предпочтительней меньшие значения для снижения дополнительного нагружения стрелы изгибающим моментом). Тогда остаются неизвестными параметры dКи hК, которые определяются из условия равенства грузовых неуравновешенных моментов на граничных вылетах. Задача решается с применением ЭВМ [15].
Прямые стрелы с уравнительным блоком в современных конструкциях портальных кранов не используются вследствие сложной конструкции рычажной системы; их схемы можно найти в литературе [5].
Дата добавления: 2015-02-19; просмотров: 4199;