Постоянные и переменные потери в электродвигателях. Пути снижения потерь энергии в переходных режимах
Полные потери


| Постоянные Не зависят от величины нагрузки ∆Рт.с.= ∆Рмех+∆Рст+∆Рв ∆Рмех – механические; ∆Рст – в стали; ∆Рв – на возбуждение | Переменные Изменяются от нагрузки двигателя, и имеют место на активных сопротивлениях обмоток электромашин. Р~ J2 на активных сопротивлениях. |
1) ДПТ НВ 
М=КФI
2) ДПТ ПВ 
3) АД 
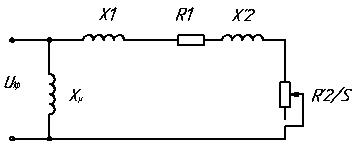 Если U на статоре АД постоянно (U=const), то потери на активных сопротивлениях стат. От Iμ (тока намагничивания) можно отнести к постоянным.
Если U на статоре АД постоянно (U=const), то потери на активных сопротивлениях стат. От Iμ (тока намагничивания) можно отнести к постоянным.

 4) СД с электромагнитн. возбужд. с возбужд. от пост. магнитов
4) СД с электромагнитн. возбужд. с возбужд. от пост. магнитов

Полные тепловые потери двигателя:




Пути снижения потерь энергии в переходных режимах:
1) За счет снижения запаса кинетической энергии  ~JΣ, т.е. JΣ достигается за счет спец. двигателей краново-металлургических серий. Удлиненный ротор в них обеспечивает снижение JΣ (суммарный момент инерции двигателя)
~JΣ, т.е. JΣ достигается за счет спец. двигателей краново-металлургических серий. Удлиненный ротор в них обеспечивает снижение JΣ (суммарный момент инерции двигателя)
2) Применение многодвигательного привода вместо однодвигательного. Такой путь малоэффективен.
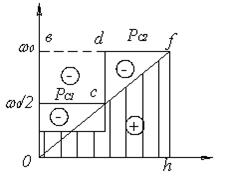
3) Наиболее существенное снижение энергии достигается путем ступенчатого изменения скорости Х.Х. при пуске/торможении. Такой способ применяется при использовании многоскоростных асинхронных двигателей.
| |

 | |||||
 | |||||
| |
Потери энергии при ступенчатом пуске снизились в 2 раза. Чем больше ступеней задания скорости, тем меньше потери энергии.
Логическое продолжение ступенчатого пуска – плавное изменение частоты во времени.

 ;
; 
Увеличение времени пуска за счет линейного формирования ω0 ведет к уменьшению потерь энергии.
4. Влияние параметров Uя, Rя, F на вид механических и электромеханических характеристик ДПТ 
5. Двухзонное регулирование скорости двигателя постоянного тока последовательного возбуждения
В первой зоне регулирование ведется за счет изменения Uя вниз от Uном.
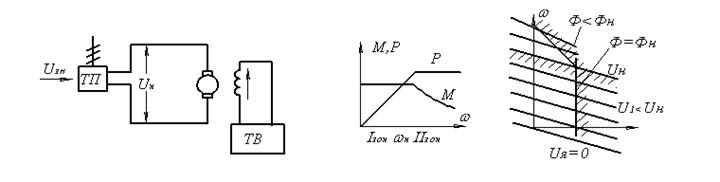
Р=↓Мω↑=const
↓Mдоп IIзона



Дата добавления: 2015-03-20; просмотров: 942;