Регулирование положения. Параболический рег-р положения.
 В трёх контурных системах (момент, скорость, положение) регулирование осуществляется через оптимизацию контура положения.
В трёх контурных системах (момент, скорость, положение) регулирование осуществляется через оптимизацию контура положения.
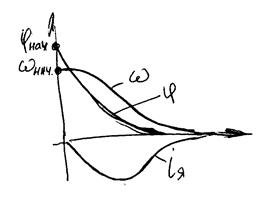
 Регулятор положения пропорциональный, коэф. усиления. РП определяет задаваемое на вход РС максимальное ускорение. Величина ускорения зависит от величины начальной скорости, чем больше скорость, тем больше ускорение а, следовательно начальная скорость. Это приводит к размягчению системы по положению и начинает работать контур регулирования положения, поэтому в системе накапливается ошибка, которая отрабатывается с перерегулированием, что в контуре регулирования положения не доступно. Поэтому для исключения перерегулирования коэффициент усиления регулируется положением, при отрабатывании больших перемещений и большой начальной скорости необходимо уменьшать коэффициент усиления, это приводит к затягиванию переходных процессов при отработке перемещения, что снижает быстродействие привода и производительность, поэтому переходят к парабал. регулированию положения, с переменным коэффициентом усиления при отрабатывании больших перемещений – маленький, а малых – большой, поэтому при таком регулировании обеспечивается одинаковое быстродействие, как при отрабатывании больших, так и малых перемещений.
Регулятор положения пропорциональный, коэф. усиления. РП определяет задаваемое на вход РС максимальное ускорение. Величина ускорения зависит от величины начальной скорости, чем больше скорость, тем больше ускорение а, следовательно начальная скорость. Это приводит к размягчению системы по положению и начинает работать контур регулирования положения, поэтому в системе накапливается ошибка, которая отрабатывается с перерегулированием, что в контуре регулирования положения не доступно. Поэтому для исключения перерегулирования коэффициент усиления регулируется положением, при отрабатывании больших перемещений и большой начальной скорости необходимо уменьшать коэффициент усиления, это приводит к затягиванию переходных процессов при отработке перемещения, что снижает быстродействие привода и производительность, поэтому переходят к парабал. регулированию положения, с переменным коэффициентом усиления при отрабатывании больших перемещений – маленький, а малых – большой, поэтому при таком регулировании обеспечивается одинаковое быстродействие, как при отрабатывании больших, так и малых перемещений.
Дата добавления: 2015-03-20; просмотров: 823;