Последовательная коррекция контура регулирования скорости с внутренним контуром регулирования М в системе УП-Д



















 Wзам =
Wзам = 
Wраз с= 
Wорс= 
Wрс= 
 UЗМ Н = МСТОКОМ
UЗМ Н = МСТОКОМ
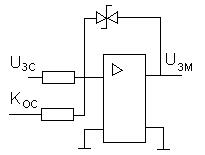
UЗМ - КОММ1=0
(UЗС - КОСω) КРС=КОТМ
 ;
;  ;
; 
Подставляем в выражение КОС - его значен.
 аС= аМ=2 Если ТМ <4 Тμ то хар-ка будет более мягкой.
аС= аМ=2 Если ТМ <4 Тμ то хар-ка будет более мягкой.
Вывод:
Регулятор скорости получ-ся пропорц потому что обеспеч статич регул скор-ти, с ростом момента величина скор уменьш-ся:
Жестокость мех. хар-ки зависит от соотношения пост. времени ТМ и Тμ  у двигателя с жесткой мех. хар-кой в замкнутой сист м.б. меншей жестк ест мех хар-ки. Для повышения жесткости следует применить 2х контурную систему с ПИ-регул скор., или дополнительно вводить второй контур регул скорости
у двигателя с жесткой мех. хар-кой в замкнутой сист м.б. меншей жестк ест мех хар-ки. Для повышения жесткости следует применить 2х контурную систему с ПИ-регул скор., или дополнительно вводить второй контур регул скорости
Дата добавления: 2015-03-20; просмотров: 884;