Оптико-механическая аналогия Гамильтона. 2 страница

Поскольку в нашем случае, корни характеристического уравнения являются комплексными сопряжёнными числами, т.е. имеет место два независимых решения:

тогда общее решение можно записать в виде:

здесь с1 и с2 –произвольные комплексные постоянные. Учитывая, что:
заключаем, что:

тогда общее решение можно представить к виду:

где выражения:

есть частные решения дифференциального уравнения. Очевидно:


тогда на основании формул Эйлера:


будем иметь соответственно:



и аналогично:



В общем случае, если дифференциальное уравнение вида:
имеет комплексные сопряжённые решения вида:


то каждая из функций  и
и  , вне зависимости от того какое из частных решений мы используем для построения общего решения в действительной (вещественной) форме, будет являться решением этого уравнения. Учитывая форму общего решения уравнений такого типа:
, вне зависимости от того какое из частных решений мы используем для построения общего решения в действительной (вещественной) форме, будет являться решением этого уравнения. Учитывая форму общего решения уравнений такого типа:
а также частные решения вида (при  и
и  ):
):


строим общее решение дифференциального уравнения в виде:


поскольку и , имеем соответственно:


Вводя вспомогательный угол  , имеем:
, имеем:

очевидно, при этом должно соблюдаться условие вида:


учитывая при этом, что:

будем иметь соответственно:

Очевидно также и другое:
поэтому соответственно:



поскольку:

поэтому:


Поскольку в результате решения дифференциального уравнения мы получаем суперпозицию решений:


то будет верно и другое:

Данное утверждение легко проверить, вводя вместо соответствующих коэффициентов  и
и  вспомогательный угол
вспомогательный угол  , т.е.
, т.е.

тогда соответственно:


учитывая, что:


Таким образом, путём соответствующих преобразований мы пришли к двум эквивалентным друг другу решениям дифференциального уравнения, записанным в показательной и тригонометрической формах.


из которых следуют уравнения вида:
Нетрудно заметить, что:


здесь величина  есть амплитуда колебания, характеризующая размах колебательного движения, величину смещения материальной точки от положения равновесия. Аргумент
есть амплитуда колебания, характеризующая размах колебательного движения, величину смещения материальной точки от положения равновесия. Аргумент  называется фазой колебания, а
называется фазой колебания, а  – начальной фазой колебания в момент времени
– начальной фазой колебания в момент времени  . Достаточно очевидно, что:
. Достаточно очевидно, что:

Расстояние, отделяющее колеблющуюся точку от положения равновесия, характеризует величина  . В общем случае амплитуда и начальная фаза колебания определяются начальными условиями движения, т.е. положением и скоростью материальной точки в момент времени . Среди различных видов колебательного движения, гармонические колебания являются наиболее простыми. Необходимо отметить, что поскольку величина
. В общем случае амплитуда и начальная фаза колебания определяются начальными условиями движения, т.е. положением и скоростью материальной точки в момент времени . Среди различных видов колебательного движения, гармонические колебания являются наиболее простыми. Необходимо отметить, что поскольку величина  характеризует смещение материальной точки от положения равновесия, а величина - амплитуду колебательного движения (размах колебания), тогда при условии:
характеризует смещение материальной точки от положения равновесия, а величина - амплитуду колебательного движения (размах колебания), тогда при условии:
величина будет сводиться к величине, и будет характеризовать, таким образом, максимальное отклонение колеблющейся материальной точки от положения равновесия, т.е. будет справедливо уравнение вида:

Необходимо также отметить, что при преобразовании дифференциального уравнения, описывающего колебания гармонического осциллятора, величина  была введена чисто формально, в то время как она имеет глубокий физический смысл, определяя частоту колебаний. Величина называется круговой (циклической) частотой. Выведенное для гармонического осциллятора дифференциальное уравнение, показывает, что данная величина зависит от жёсткости пружины и массы материальной точки. Аналогичная угловой скорости
была введена чисто формально, в то время как она имеет глубокий физический смысл, определяя частоту колебаний. Величина называется круговой (циклической) частотой. Выведенное для гармонического осциллятора дифференциальное уравнение, показывает, что данная величина зависит от жёсткости пружины и массы материальной точки. Аналогичная угловой скорости  , она связывает линейную скорость и период колебаний, представляя, таким образом, число периодов колебаний, за которые фаза колебания получит приращение
, она связывает линейную скорость и период колебаний, представляя, таким образом, число периодов колебаний, за которые фаза колебания получит приращение  . Это становится очевидным из следующих рассуждений. Поскольку формально:
. Это становится очевидным из следующих рассуждений. Поскольку формально:
тогда соответственно:
и таким образом:
Очевидно, чем больше по величине будет круговая (циклическая) частота, тем меньше будет величина периода колебательного движения. Проводя аналогию между угловой скоростью и циклической частотой, можно увидеть, что чем больше будет скорость, с которой колеблющаяся точка совершит полный оборот на при своём движении, получая, таким образом, приращение , тем за меньшее время будет совершено системой колебательное движение. Таким образом, частица около точки равновесия совершает гармоническое (по закону синуса или косинуса) колебательное движение с циклической частотой . В связи с этим колебательные системы такого типа называют гармоническим осциллятором. Как известно, в центральном поле сил, потенциальная энергия частицы (системы частиц) зависит от расстояния между частицей (системой частиц) и центром силового поля. Обычно для наглядности, задачу о движении в центральном поле сил сводят к двум моделям – модели гармонического осциллятора и движении частицы в кулоновском поле сил. Как известно, гармонический осциллятор представляет собой колебательную систему, которая совершает свободные (собственные) незатухающие механические колебания, совершаемые без внешнего воздействия за счёт первоначально полученной телом энергии. При рассмотрении колебаний такого вида – пренебрегают силой сопротивления, а совершающиеся непрерывные осциллирующие движения рассматривают как гармонические, т.е. как такие, что совершаются в системе по закону синуса или косинуса. Такие непрерывные колебательные движения, очевидно, могут осуществляться только под действием квазиупругой силы, т.е. такой, что возникает в системе при малых деформациях. Поскольку, в случае гармонического осциллятора, колебательное движение будет совершаться под действием упругой возвращающей силы, то при малых деформациях частица (система частиц) в данном случае, будет совершать колебания относительно положения равновесия. Поскольку квазиупругая сила является консервативной по своей природе, поэтому полная энергия такой системы должна оставаться постоянной. Действительно, пусть общее решение дифференциального уравнения, описывающего колебания гармонического осциллятора имеет вид:

Cогласно закона Гука, сила упругости пропорциональна деформации:
на основании третьего закона Ньютона, для преодоления силы упругости пружины, необходимо приложить силу  , равную:
, равную:
Очевидно элементарная работа  , совершаемая силой при малых деформациях, будет определяться выражением вида:
, совершаемая силой при малых деформациях, будет определяться выражением вида:
учитывая, что  и работа смещения осуществляется вдоль одной из координатных осей, имеем:
и работа смещения осуществляется вдоль одной из координатных осей, имеем:
откуда:
Запишем выражение для полной энергии гармонического осциллятора:
потенциальная энергия осциллятора имеет параболическую зависимость от координаты  т.е.
т.е.
что, очевидно, соответствует закону Гука:
выражение для кинетической энергии осциллятора:

с учётом выражений:
можно представить к виду:
тогда выражение для полной энергии гармонического осциллятора:
может быть задано уравнением вида:
или, что то же самое:
Учитывая общее решение дифференциального уравнения, описывающего колебания гармонического осциллятора:
будем иметь для общей энергии колебательной системы выражение вида:
поскольку:
тогда после подстановки получаем соответственно:
аналогично, для кинетической энергии имеем:
откуда соответственно:
Таким образом, для потенциальной и кинетической энергий, приходим соответственно к выражениям вида:
и соответственно:
после их подстановки в выражение для полной энергии осциллятора:
будем иметь:
Итак, имеем для полной энергии осциллятора выражение вида:
Таким образом, в процессе колебательного движения происходит превращение кинетической энергии в потенциальную и обратно, причём в моменты наибольшего отклонения от положения равновесия, полная энергия системы будет состоять, только из потенциальной энергии, которая будет достигать своего наибольшего значения  . Точки, в которых потенциальная энергия равна полной энергии
. Точки, в которых потенциальная энергия равна полной энергии  , называют точками остановки. В точках остановки (поворота) кинетическая энергия обращается в нуль. Если движение материальной точки происходит между двумя точками остановки, его называют финитным. Если же движение не ограничено или ограничено только одной точкой остановки, то его называют инфинитным. В соответствии с выше изложенным можно заключить, что гармонический осциллятор совершает одномерное финитное движение. Это означает, что частица совершает периодически повторяющиеся движения между двумя точками остановки. Такое движение называют колебательным. При финитном движении в точках остановки кинетическая энергия осциллятора обращается в нуль и полная его энергия равна его потенциальной энергии. В промежутках между двумя точками остановки, потенциальная энергия уменьшается и при прохождении через положение равновесия – обращается в нуль. В этом случае полная энергия системы будет равна его кинетической энергии.
, называют точками остановки. В точках остановки (поворота) кинетическая энергия обращается в нуль. Если движение материальной точки происходит между двумя точками остановки, его называют финитным. Если же движение не ограничено или ограничено только одной точкой остановки, то его называют инфинитным. В соответствии с выше изложенным можно заключить, что гармонический осциллятор совершает одномерное финитное движение. Это означает, что частица совершает периодически повторяющиеся движения между двумя точками остановки. Такое движение называют колебательным. При финитном движении в точках остановки кинетическая энергия осциллятора обращается в нуль и полная его энергия равна его потенциальной энергии. В промежутках между двумя точками остановки, потенциальная энергия уменьшается и при прохождении через положение равновесия – обращается в нуль. В этом случае полная энергия системы будет равна его кинетической энергии.
3.1.4.1.б. Рассмотрение движения частицы в поле постоянного потенциала. Введение представлений о круговых орбитах.
Рассмотрим теперь движение частицы с зарядом  в кулоновском поле, которое создаётся другой частицей с зарядом
в кулоновском поле, которое создаётся другой частицей с зарядом  . Поскольку движение такой частицы происходит в центральном силовом поле, то момент импульса частицы относительно центра масс сохраняется; т.е. имеем соответственно:
. Поскольку движение такой частицы происходит в центральном силовом поле, то момент импульса частицы относительно центра масс сохраняется; т.е. имеем соответственно:
откуда:
это утверждение легко доказать. Так, имеем соответственно:
Так как пары векторов:
 и
и 
являются коллинеарными, то движение частицы будет происходить, очевидно, в одной плоскости, и орбита частицы, таким образом, будет являться плоской. Пусть движение частицы происходит в плоскости  . В этом случае две компоненты вектора момента импульса частицы
. В этом случае две компоненты вектора момента импульса частицы  и
и  очевидно будут равняться нулю. Тогда вектор момента импульса можно будет очевидно записать как:
очевидно будут равняться нулю. Тогда вектор момента импульса можно будет очевидно записать как:
т.е. движение частицы будет совершаться в плоскости, перпендикулярной оси  . Таким образом, в силу закона сохранения момента импульса в центральном поле сил - компонента момента импульса будет являться постоянной величиной:
. Таким образом, в силу закона сохранения момента импульса в центральном поле сил - компонента момента импульса будет являться постоянной величиной:
Обычно движение частицы в центральном поле сил удобно рассматривать в полярных координатах  и
и  . В целях дальнейших выкладок выясним, как будет выглядеть гамильтониан в полярной системе координат.
. В целях дальнейших выкладок выясним, как будет выглядеть гамильтониан в полярной системе координат.
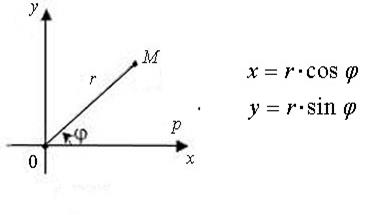
Рис.7.
Так, пусть задана частица, движущаяся в плоскости (x, y), при этом очевидно будет равно нулю. Необходимо получить канонические уравнения движения в полярной системе координат. Для этого установим уравнения связи между линейными координатами частицы и её угловыми характеристикам. В общем случае полярная система координат представляет собой двумерную систему координат, в которой каждая точка плоскости определяется двумя числами – полярным углом и полярным радиусом . Полярная система координат задаётся лучом, который называют нулевым или полярной осью. Точка, из которой выходит этот луч, называется началом координат или полюсом. Любая точка на плоскости определяется в общем случае двумя полярными координатами – радиальной и угловой. Так, выражая гамильтониан в явном виде через обобщённые импульсы  и
и  , считая при этом, что у потенциала U эта замена уже проведена, будем иметь
, считая при этом, что у потенциала U эта замена уже проведена, будем иметь
соответственно выражение вида::
Учитывая, что:

имеем соответственно:
В рамках рассматриваемой задачи кинетическая энергия E, входящая в выражение для гамильтониана H, в декартовой системе координат:

Сумма квадратов дифференциалов, может быть, очевидно, вычислена непосредственным дифференцированием выражений:

тогда:


и соответственно:

Следовательно, кинетическую энергию T можно рассматривать с этих позиций как некоторую функцию обобщённых скоростей  , т.е. имеем соответственно:
, т.е. имеем соответственно:
откуда находим радиальный и угловой импульсы:


и таким образом:
откуда:
подставляя полученные выражения в уравнение:
имеем соответственно:
откуда:

и таким образом:
Подстановка аналитического выражения для кинетической энергии в уравнение:
даёт искомое выражение гамильтониана в полярных координатах:
Выясним теперь вид гамильтониана в сферической системе координат. Сферическая система координат представляет собой трёхмерную систему координат:
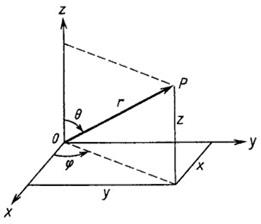
Рис.8.
В данной системе координат каждая точка пространства задаётся тремя числами – радиус-вектором , определяющим расстояние от начала координат до некоторой точки P и двумя углами –  , образующим угол между положительным направлением оси Oz и радиус-вектором точки P и – образованном проекцией радиус-вектора на плоскость Oxy с положительным направлением оси Ox. Используя формализм Гамильтона, рассмотрим задачу о построении функции Гамильтона (гамильтониана) для частицы в сферической системе координат. Итак, положение материальной точки P в сферической системе координат задаётся тремя величинами: радиус-вектором , который характеризует расстояние от точки до центра координат и двумя углами и . Взаимосвязь между этими тремя величинами и декартовой системой координат определяется соотношениями вида:
, образующим угол между положительным направлением оси Oz и радиус-вектором точки P и – образованном проекцией радиус-вектора на плоскость Oxy с положительным направлением оси Ox. Используя формализм Гамильтона, рассмотрим задачу о построении функции Гамильтона (гамильтониана) для частицы в сферической системе координат. Итак, положение материальной точки P в сферической системе координат задаётся тремя величинами: радиус-вектором , который характеризует расстояние от точки до центра координат и двумя углами и . Взаимосвязь между этими тремя величинами и декартовой системой координат определяется соотношениями вида:

Компоненты вектора в декартовой системе координат могут быть выражены далее через соответствующие компоненты сферической системы координат:

и аналогично для двух других компонент скорости будем иметь соответственно:


Запишем аналитическое выражение для функции Гамильтона в декартовой системе координат. При этом учтём, что кинетическая энергия частицы должна быть выражена через импульсы. Так, имеем соответственно:
откуда соответственно:

здесь:
Таким образом, функцию Гамильтона можно представить к виду:

Учитывая, что:
имеем:

Зная вид гамильтониана в декартовой системе координат, преобразуем его в сферическую систему координат. Для этого запишем кинетическую энергию как функцию координат  и соответствующих скоростей
и соответствующих скоростей  путём подстановки производных
путём подстановки производных  в выражение для кинетической энергии:
в выражение для кинетической энергии:

здесь:


Дата добавления: 2015-03-14; просмотров: 921;