Система Г - Д в чистом виде.
Система Г-Д как минимум состоит из трех электрических машин:
1. исполнительного электродвигателя М2, приводящего в действие механизм;
2. генератора G1, питающего исполнительный ЭД;
3. приводного электродвигателя Ml, вращающего якоря генератора G1 и образую-
щего с ним так называемый преобразователь.
Машины М2 и G1 - постоянного тока с независимым возбуждением.
Несмотря на это, система Г-Д может применяться при любом роде тока питающей сети.
Если сеть постоянного тока, то в качестве приводного двигателя М1 применяют ЭД параллельного возбуждения, а обмотки возбуждения всех машин получают питание от сети.
Если сеть переменного тока, используют асинхронный приводной ЭД. Для питания обмоток возбуждения L1G1 и LM2 в этом случае применяют четвертую машину – возбудитель G2. Это небольшой генератор постоянного тока с самовозбуждением. Он приводится во вращение тем же приводным электродвигателем М1 , что и генератор G1 ( рис. 7.1. ).
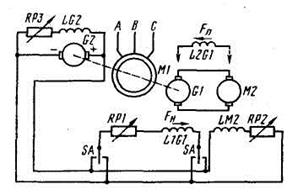
Рис. 7.1. Схема системы генератор – двигатель
Система действует следующим образом.
Сначала пускают приводной ЭД М1, якорь которого затем вращается постоянно в одну сторону с неизменной скоростью. Потом при помощи регулировочного резистора
( реостата возбуждения ) RP3 возбуждают возбудитель G2, создающий неизменное напряжение.
От него получают питание независимые обмотки возбуждения исполнительного электродвигателя LM2 и генератора L1G1.
В цепь первой включен регулировочный резистор RP2, в цепь второй – регулиро-
вочный резистор RP1 и переключатель SA, изменяющий направление тока в обмотке L1G1.
Перед пуском резистор RP1 должен быть полностью введен в цепь, а резистор RP2 - выведен.
Для пуска М2 переключатель SA устанавливают в одно из рабочих положений и
постепенно выводят резистор RP1, увеличивая этим ток возбуждения в обмотке L1G1.
Последний возбуждается и подает плавно возрастающее напряжение на якорную обмотку М2. По цепи якорей G1 и М2 протекает ток.
Так как М2 возбужден, его якорь начинает вращаться, и по мере возрастания напря-
жения, подведенного к его якорю, увеличивается угловая скорость. При полностью выве-
денном резисторе RP1 напряжение G1 и угловая скорость М2 номинальные.
Для реверса переключателем SA изменяют направление тока в обмотке возбуждения L1G1. Генератор изменяет полярность напряжения, ток якорной цепи изменяет направление, и исполнительный двигатель М2 реверсируется.
Регулирование скорости вниз от номинальной выполняют, вводя в цепь обмотки возбуждения L1G1 регулировочный резистор RP1. Ток возбуждения, магнитный поток и напряжение генератора уменьшаются. Вследствие этого снижается напряжение, подведенное к обмотке якоря М2, и его угловая скорость уменьшается ( характеристики 3, 2 и 1 на
рис. 7.2. ).
Регулирование скорости вверх от номинальной осуществляют, вводя в цепь обмот-
ки возбуждения М2 регулировочный резистор RP2, что уменьшает ток и поток возбужде-
ния, при этом скорость ЭД увеличивается ( характеристики 5, 6 и 7 на рис. 7.2. ).
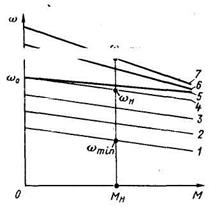
Рис. 7.2. Механические характеристики исполнительного двигателя
в системе генератор – двигатель: 4 – естественная; 3, 2 и 1 – искусственные, полученные уменьшение напряжения на обмотке якоря М2; 5, 6 и 7 –искусствен-
ные, полученные ослаблением магнитного потока М2
Достоинства системы Г - Д :
1/. Широкий диапазон регулирования ( 1- 20, 1 – 30 ).
2/. Большая плавность регулирования.
3/. Экономичность регулирования.
4/. Простота регулирования.
Недостатки системы Г – Д :
1/. Большое количество Эл.машин.
2/. Дороговизна и громоздкость.
3/. Низкий КПД системы.
Рассмотренная система называется «система Г – Д в чистом виде» на практике не применяется. Это объясняется тем, что при работе с номинальным напряжением на якоре М2 внезапная остановка этого якоря ( например, под винт попала льдина ) приводит к резкому увеличению тока якорей двигателя М2 и генератора G1 до значения, равного пусковому.
Кроме того, такое увеличение тока приводит к увеличению нагрузки на приводной двигатель генератора. Это особенно опасно, если генератор G1 приводится во вращение дизелем. Как известно, дизели крайне чувствительны к перегрузкам ( не более 10% мощности в течение 1 часа ).
Развитие полупроводниковой техники позволило перейти от рассмотренной системы Г – Д к т.н. системам «управляемый вентильный преобразователь – двигатель», или, сокращенно, системам УВП – Д ( рис. 7.3. ).
Вентильный преобразователь выпрямляет напряжение и регулирует его в нужных пределах. Для питания цепей якоря двигателя применяют однополупериодные схемы с нулевым выводом ( рис. 7.3, а ) или двухполупериодные мостовые схемы ( рис.7.3., б ).

Рис. 7.3. Схемы включения якоря двигателей постоянного тока на вентильный преобразователь: с нулевым выводом ( а ); мостовая ( б )
В таких схемах обмотки возбуждения двигателей обычно получают питание от общей сети переменного тока через маломощные однофазные выпрямители.
Контрольные вопросы по теме :
1. Назовите основные элементы системы Г-Д в чистом виде.
2. Как регулируют частоту вращения в системах Г-Д ?
3. Как производится реверс ИД в системах Г-Д ?
4. Назовите достоинства и недостатки системы Г-Д .
Литература :
Учебник § 11
Занятие № 8
Практическая работа № 1
Тема : « Система Г – Д с противокомпаундным генератором.
Практическое использование систем Г – Д »
Цель работы : Где практически используется система Г-Д и как обеспечивается
защита системы при перегрузках.
Дата добавления: 2017-03-29; просмотров: 3634;