Классификация кинематических пар.
Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой. На схемах кинематические пары обозначают прописными буквами латинского алфавита.
Совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементами кинематической пары.
Кинематические пары (КП) классифицируются по следующим признакам:
1. По виду места контакта (места связи) поверхностей звеньев:
– низшие, в которых контакт звеньев осуществляется по плоскости или поверхности конечных размеров (пары скольжения );
– высшие, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение с перекатыванием).
Из числа плоских к низшим кинематическим парам относятся поступательная и вращательная. (Низшие кинематические пары позволяют передавать большие усилия, более технологичны и менее изнашиваются, чем высшие кинематические пары).
2. По относительному движению звеньев, образующих пару:
– вращательные;
– поступательные;
– винтовые;
– плоские;
– пространственные;
– сферические.
3. По способу замыкания (обеспечения контакта звеньев пары):
– силовое (Рис.2) (за счет действия сил веса или силы упругости пружины);
Рис.2
– геометрическое (Рис.3.) (за счет конструкции рабочих поверхностей пары).
Рис. 3
На рис. 3. видно, что во вращательной и поступательной кинематических парах замыкание соединенных звеньев осуществляется геометрически. В кинематических парах «цилиндр-плоскость» и «шар-плоскость» (см. табл. 2) силовым способом, т.е. за счет собственной массы цилиндра и шара или другими конструктивными решениями (например, в сферическом шарнире шар может прижиматься к охватывающей поверхности за счет сил упругости дополнительно вводимой в конструкцию шаровой опоры автомобиля пружины). Элементы геометрически замкнутой пары не могут отделяться друг от друга из-за конструктивных особенностей.
4. По числу условий связи, накладываемых на относительное движение звеньев (число условий связи определяет класс кинематической пары);
В зависимости от способа соединения звеньев в кинематическую пару число условий связи может измениться от одного до пяти. Поэтому все кинематические пары можно разделить на пять классов.
5. По числу подвижностей в относительном движении звеньев (число степеней подвижности определяет род кинематической пары);
Кинематические пары обозначаются Pi , где i =1 - 5 – класс кинематической пары. (Кинематическая пара пятого класса является парой первого рода).
Классификация КП по числу подвижностей и по числу связей приведена в таблице 2.
В таблице представлены некоторые виды кинематических пар всех пяти классов. Стрелками обозначены возможные относительные движения звеньев. По виду реализуемых в кинематических парах простейших независимых движений вводят обозначения (цилиндрическая пара обозначается ПВ, сферическая – ВВВ и т.д., где П – поступательное, В – вращательное движение).
Подвижность кинематической пары – число степеней свободы в относительном движении ее звеньев. Различают одно-, двух-, трех-, четырех- и пятидвижные кинематические пары.
Таблица 2. Классификация кинематических пар
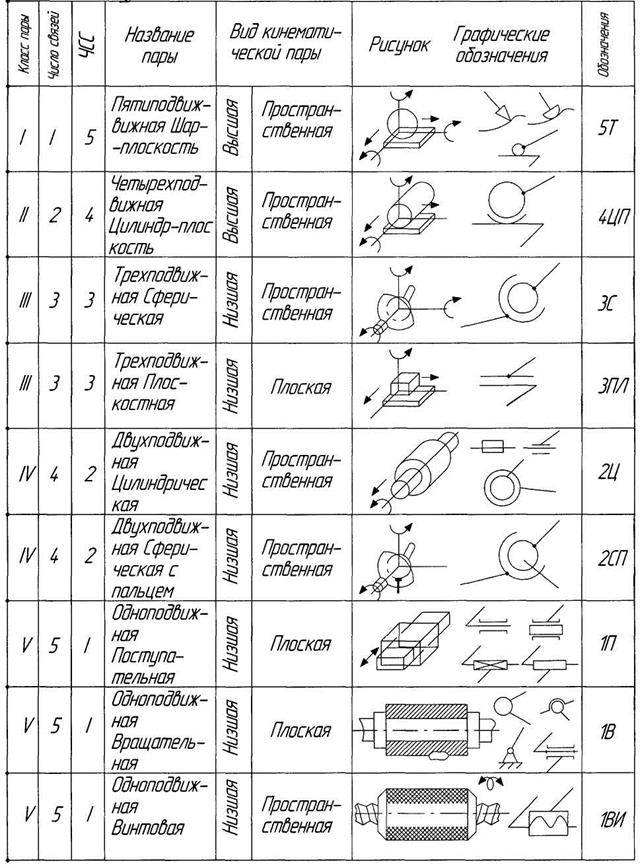
Одноподвижной (парой V класса) называется кинематическая пара с одной степенью свободы в относительном движении её звеньев и пятью наложенными условиями связи. Одноподвижная пара может быть вращательной, поступательной или винтовой.
Вращательная пара допускает одно вращательное относительное движение её звеньев вокруг оси X. Соприкосновение элементов звеньев вращательных пар происходит по боковой поверхности круглых цилиндров. Следовательно, эти пары относятся к низшим.
Поступательной парой называется одноподвижная пара, допускающая прямолинейно-поступательное относительное движение её звеньев. Поступательные пары также являются низшими, так как соприкосновение элементов их звеньев происходит по поверхностям.
Винтовой парой называется одноподвижная пара, допускающая винтовое (с постоянным шагом) относительное движение её звеньев и принадлежащая к числу низших пар.
При образовании кинематической пары можно подобрать так форму элементов кинематических пар, что при одном независимом простейшем перемещении возникает другое производное движение, как например, в винтовой паре. Такие кинематические пары называются траекторными.
Двухподвижная кинематическая пара (пара IV класса) характеризуется двумя степенями свободы в относительном движении её звеньев и четырьмя условиями связи. Такие пары могут быть либо с одним вращательным и одним поступательным относительными движениями звеньев, либо с двумя вращательными движениями.
К первому виду принадлежит так называемая цилиндрическая пара, т.е. низшая кинематическая пара, допускающая независимые вращательное и колебательное (вдоль оси вращения) относительные движения её звеньев.
Примером пары второго вида является сферическая пара с пальцем. Эта низшая геометрически замкнутая пара, допускающая относительное вращение своих звеньев вокруг осей X и У.
Трехподвижной парой называется кинематическая пара с тремя степенями свободы в относительном движении её звеньев, что свидетельствует о наличии трёх наложенных условий связи. В зависимости от характера относительного движения звеньев различают три вида пар: с тремя вращательными движениями; с двумя вращательными и одним поступательным движениями; с одним вращательным и двумя поступательными.
Основным представителем первого вида является сферическая пара. Это низшая геометрически замкнутая пара, допускающая сферическое относительное движение её звеньев.
К третьему виду принадлежит так называемая плоскостная пара, т.е. низшая кинематическая пара, допускающая плоскопараллельное относительное движение её звеньев.
Четырехподвижная пара (пара II класса) - это кинематическая пара с четырьмя степенями свободы в относительном движении её звеньев, т.е. с двумя наложенными условиями связи. Все четырёхподвижные пары являются высшими. Примером может служить пара, допускающая два вращательных и два поступательных движения.
Пятиподвижной парой (пара I класса) называется кинематическая пара с пятью степенями свободы в относительном движении её звеньев, т.е. с одним наложенным условием связи. Такая пара, составленная из двух сфер, разрешает три вращательных и два поступательных движения и всегда будет высшей.
Кинематическое соединение – кинематическая пара с числом звеньев более двух.
Дата добавления: 2018-03-01; просмотров: 34349;