Регулювання швидкості приводів верстатів.
Регулювання швидкості приводів верстатів необхідно для утворення опти –
мальних умов обробки матеріалу та необхідної продуктивності.
Основним критерієм, який визначає швидкість обертання шпинделю є швидкість різання Vz.
 де Dобр – діаметр деталі.
де Dобр – діаметр деталі.
Регулювальні властивості механізмів верстатів.
1) діапазон регулювання:  - для верстатів з обертовим ГР.
- для верстатів з обертовим ГР.
 для верстатів зі зворотно-поступовим ГР.
для верстатів зі зворотно-поступовим ГР.
2) плавність регулювання: j = wi+1 / wi = n i+1 / ni , де wi+1 і wi - швидкості на
двох сусідніх ступенях регулювання.
3) економічність регулювання, - визначається витратами на створення систе -
ми та вартістю втрат електроенергії при регулюванні.
4) стабільність роботи приводу, яка характеризується перепадом швидкості
Dw / wном зі зміною навантаження (визначається жорсткістю механічної ха-
рактеристики електродвигуна).
Діапазони регулювання приводів металорізальних верстатів:
Тип верстатів Головний привід Привод подачі
Токарні (середні і крупні) 40 – 125 50 – 3000
Карусельні (важкі) 40 – 100 100 – 7000
Свердлильні 20 – 100 5 – 40
Фрезерні (універсальні) 20 – 40 100 – 600
Поздовжньо-стругальні 10 – 30 50 – 100
Способи регулювання швидкості електроприводу верстатів.
Регулювання швидкості електроприводу верстатів здійснюється механічним,
електромеханічним та електричним способами.
1. Механічне ступеневе регулювання швидкості електроприводів виконується ступнево шляхом переключення шестірень коробок швидкостей ГП або ПП, які змінюють передавальне відношення. Його здійснюють вручну або дистанційно за допомогою фрикційних електромагнітних муфт, гідравлічних механізмів або окремих електродвигунів.
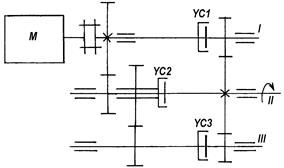
Рис. 2.4. Механічне регулювання за допомогою електромагнітних муфт.
Вузол зміни кутової швидкості ви –
хідного вала ІІ виконується шляхом переключення шестірень коробки
швидкостей за допомогою електро–
магнітних муфт YC1, YC2, YC3
2. Електричне безступневе 
регулювання швидкості електроприводів.А) Електроприводи змінного струму:
- зміною кількості пар полюсів;
- зміною частоти напруги живлення;
- зміною значення активного опору роторного кола двигунів з фазним ротором;
- зміною значення напруги живлення;
- за допомогою керованих муфт ковзання.
В) Електроприводи постійного струму:
- зміною зовнішнього опору в колі якорю;
- зміною величини магнітного потоку збудження;
- зміною діючого значення напруги живлення якірного кола двигуна:
зміною величини напруги або зміною скважності імпульсів напруги живлення, тобто – імпульсне регулювання (використовується переважно в електро – приводі автоматики верстатів).
Режими роботи електродвигунів верстатів.
Для забезпечення нормальної роботи верстата при заданій циклічності його роботи, яка визначається часом роботи Тр і часом паузи Т0 , двигуни повинні відповідати умовам:
- розвивати найбільшу потужність, яка необхідна для виконання процесу обробки;
- не перегріватися при роботі зі змінним навантаженням.
Приводи верстатів працюють в наступних режимах:
1) довготривалий з постійним навантаженням (S1), - номінальна потужність двигуна дорівнює або трохи більша за потужність верстата (ГП крупних токарних, шліфувальних, зубофрезерних та інших верстатів).
2) переміжний з частими реверсами (S7) (ГП поздовжньо-стругального верстата), номінальна потужність двигуна визначається по навантажувальний діаграмі методом середніх втрат або еквівалентних величин.
3) повторно-короткочасний (S3, S4) (ГП свердлувальних і заточувальних верстатів), номінальна потужність визначається аналогічно п.2.
4) короткочасний (S2) характерний для допоміжних приводів Тр = 5 – 15с,
1 – 1,5 хв., номінальна потужність визначається за умовами перевантаження.
З метою підвищення коефіцієнту потужності необхідно прагнути до більш повного завантаження двигунів, до скорочення або виключення холостого ходу.
Дата добавления: 2017-11-04; просмотров: 1808;