Основні та допоміжні рухи в верстатах, кінематичні схеми.
Процес отримання на верстатах деталей заданої форми і розмірив склада –
ється в зніманні з заготовки лишнього металу за допомогою інструменту, рі –
жуча кромка якого пересувається відносно заготовки.
Таким чином: верстат являє собою поєднання механізмів, які виконують визначену роботу, яка пов’язана зі зміною форми, розмірив і шорсткості поверхонь заготовок за допомогою верстатного інструменту (Рис.2.2.).
Схеми різання розрізняються по інструменту, який використовується і по характеру його руху.
Сутність процесу різання заключається в руйнуванні (порушенні суцільної структури) матеріалу під дією інструментів і прикладанням зовнішніх сил з дотриманням визначених параметрів, які впливають на якість обробки.
 |

 | |||||
 |  |
 |
 Рис.2.2. Види обробки матеріалів різанням.
Рис.2.2. Види обробки матеріалів різанням.

Необхідне відносне переміщення ріжучої кромки інструменту здійснюється внаслідок сполучення рухів інструменту і заготовки, які називаються основними (робочими)рухами.
Основні рухи поділяються на:
- Головний рух, (ГР)-рухза рахунок якого інструмент виконує різання.
Головний рух здійснюється окремим електроприводом, який називається
головним приводом (ГП).
- Рух подачі, який призначений для переміщення інструменту або заго-
товки. Рух подачі здійснюється або від головного приводу через механічну
передачу, або від окремого приводу подачі (ПП).
Допоміжний рух, який призначений для вдосконалення процесу обробки,
тобто: установки інструменту, автоматичного підводу робочих органів, попередньої установки, фіксації і швидкого відводу їх, а також для подачі в зону різання змащувально-охолоджувальної рідини (ЗОР). Приводи, які виконують допоміжні рухи називаються допоміжними.
Передача рухів в верстатах від двигунів до робочих органів здійснюється кінематичними колами, які складають кінематичну схему верстату.
По кінематичній схемі розраховуються швидкості руху робочих органів верстату (або по заданим швидкостям робочих органів визначаються кутові швидкості двигунів), а також моменти на валу двигуна і ККД механізму.
2.Параметри процесу обробки.
1. Подача – це шлях, який проходить інструмент (різець) за один оберт шпинделю, або заготовка за одиницю часу.
Для верстатів з обертовим головним рухом (токарні, свердлильні) подача
є обертовою і вимірюється в міліметрах за оберт шпинделю: [S] = мм/об.
Для верстатів зі зворотно-поступовим головним рухом подача є хвилинною і вимірюється в міліметрах за хвилину [Sхв] = мм/хв.
Sхв= S × n , де n – оберти шпинделю, об/хв.
В залежності від напрямку руху інструменту відносно осі обертання шпин-
делю подача може бути повздовжньою або поперечною.
2. Глибина різанняt –це найкоротша відстань між поверхнею, яка оброб –
люється і поверхнею, яка оброблена за один прохід (рис.2.3.).
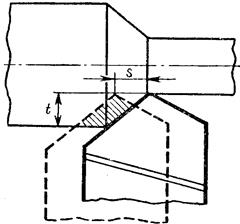 |
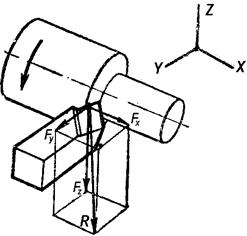
Рис.2.3. Подача, глибина і сила різання при обточуванні на токарному верстаті.
3. Швидкість різання Vz – це швидкість переміщення точки поверхні, яка
обробляється відносно ріжучої кромки інструменту.
Для верстатів з обертовим головним рухом, - це окружна швидкість за –
готовки (інструменту):
Vz = p×D×n / 1000, м / хв.
D – діаметр заготовки (інструменту), мм;
n – частота обертання заготовки (інструменту), хв-1 (об/хв.).
(Для шліфувальних верстатів швидкість різання вимірюється в м/с.)
Для верстатів зі зворотно-поступовим головним рухом швидкістю різання
являється швидкість робочого ходу Vр.
Vр= Lр / 1000Тр,м/хв., де
Lр – довжина ходу робочого органа верстата, мм;
Тр – час робочого ходу, хв.
4.Сила і потужність різання.
На інструмент діє сила R (рис.2.3), значення якої залежить від параметрів
різання, геометрії інструменту, матеріалу заготовки та від властивості ЗОР.
Силу Rможна розкласти по трьох взаємно перпендикулярним напрямках
на складові: Fx, Fy, Fz.
Fz –сила різаннямає найбільше значення діє в напрямку швидкості різання і визначає потужність, яка необхідна для здійснення головного руху.
Fx– сила подачі, діє протилежно напрямку повздовжньої подачі і визначає потужність, яка витрачається на цю подачу.
Fy– радіальна сила, діє протилежно напрямку поперечної подачі (наприклад при відрізанні заготовки).
Приблизні співвідношення:
Fy = (0,4 ¸ 0,5) Fz , Fx = (0,25 ¸ 0,3) Fz , R = (1,1¸ 1,15)Fz .
Потужність різання Рріз – це ефективна потужність, яка необхідна для руй –
нування шару металу в процесі різання.
Рріз= ( Fz × Vz / 60) × 10 -3 , кВт,де [ Fz] , Н, [Vz] , м/хв.
Потрібна потужність електродвигуна Рдв. більше Рріз на величину втрат в механізмах верстата, які залежать від ККД (h).
Рдв.= Рріз / h ,кВт.
Потужність подачі: Рп = Fx× Sхв / 60 ,кВт.
Для практичних розрахунків користуються співвідношеннями:
Рп = (0,01 ¸ 0,02) Рріз – для токарних і свердлильних верстатів;
Рп = (0,02 ¸ 0,03) Рріз – для фрезерних верстатів.
При використанні потужності електродвигуна головного приводу для подачі інструменту:
Рдв = Ртер + Рріз / h1 + Рп / h2 ,де
h1 – ККД механізму головного приводу,
h2 – ККД механізму привода подачі,
Ртер – потужність, яка витрачається на подолання сил тертя в напрямних механізму подачіРтер = (Gпр × m × Sхв / 60) × 10 –3, кВт, де.
m - коефіцієнт тертя,
Gпр – вага пристрою, Н.
При пересуванні механізму в вертикальному напрямку потужність двигуна допоміжного приводу або приводу подачі додатково витрачається на підйом цього механізму Рв:Рв = Gпр × Sхв / 60 × 10 –3, кВт.
Втрати потужності в верстаті при номінальному навантаженні DРв.н:
DРв.н = (Рріз.ном./ hном) - Рріз.ном.
Потужність холостого ходу механізму верстату Рх.х :
Рх.х = 0,6 DРв.н , або Рх.х = a × Рріз ,де
a = 0,6 (1 - hном) / hном
3.Загальні питання електроприводу верстатів.
1. Вимоги до електроприводів основних і допоміжних рухів.
Вибір типу електроприводу для основних рухіввизначається наступними факторами:
- діапазон і плавність регулювання швидкості робочого механізму;
- характер навантаження приводу;
- частота включень приводу;
- співвідношення періодів машинного та допоміжного часу роботи верстата;
- енергетичні показники роботи приводу (ККД, соsj);
- надійність і високі експлуатаційні показники електроприводу.
Механічні характеристики двигунів головного приводу повинні бути
жорсткими.
Перепад кутової швидкості при зміні навантаження на валу двигуна від холостого ходу до номінального не повинен перевищувати 5 ¸ 10 %, тобто:
Приводи подачі верстатів повинні забезпечувати необхідні швидкості подачі і мати жорстку механічну характеристику.
Типи приводів подачі:
- від головного приводу через механічну передачу;
- від окремого електродвигуна;
- від гідроприводу.
Здійснення подачі від головного приводу дозволяє зберегти постійним співвідношення між швидкістю подачі і частотою обертання шпинделю, що є важливим при нарізанні різьби. Але при цьому неможливе плавна зміна швидкості подачі.
Типи електроприводів металорізальних верстатів.
Для головних електроприводів токарних, фрезерних, свердлильних і розто- чувальних верстатів, які мають не часті включення з невеликім діапазоном
Регулювання частоти обертання шпинделю при Р » const, використовують:
1) 3 фазні асинхронні двигуни з короткозамкненим ротором. Регулювання n
здійснюється за допомогою коробки швидкостей.
2) багатошвидкісні асинхронні двигуни з переключенням кількості пар полюсів, що дозволяє зменшити розміри коробки швидкостей.
На поздовжньо-стругальних, кругло та плоско-шліфувальних та інших верстатах, які працюють при великих значеннях діапазону регулювання D і з частими реверсами використовують привод з електродвигунами постійного струму з регулюванням кутової швидкості.
Приводи подачі важких верстатів часто виконують від окремих двигунів з підвищеним пусковим моментом.
Для виконання допоміжних рухів крім електричного приводу широке розповсюдження має гідравлічний та пневматичний приводи.
Конструктивне виконання електродвигунів вибирається з врахуванням спрощення конструкції верстата і підвищення технологічності експлуатації та ремонту.
Двигуни змінного струму вибирають з серій 4А, 4АВ, 4АП, АИР, АИС на синхронну частоту обертання 1000, 1500 та 3000 об/хв.
Двигуни постійного струму серій 2П, ПС, ПСТ, ПБСТ, які допускають короткочасне струмове навантаження до 8×Іном.
Крокові електродвигуни використовують в приводах подачі верстатів з ЧПК та в роботизованих системах.
Дата добавления: 2017-11-04; просмотров: 3823;