Спосіб прямого програмування
Розглянемо перехід від опису імпульсної системи за допомогою Z-передаточних функцій до опису за допомогою змінних стану. Як вже наголошувалося, вибір змінних стану не є єдиним, і визначається вибором відповідного базису. Практично зручним прийомом вибору змінних стану є складання схем моделювання дискретних систем. Схеми включають елементи затримки на такт і суматори. При виборі змінних стану імпульсних систем за них зручно приймати виходи елементів затримки на такт.
Розглянемо три способи переходу від Z-передаточної функції дискретної системи до рівнянь у просторі станів: способи прямого програмування, послідовного програмування і паралельного програмування на прикладі ланки другого порядку з одним входом і одним виходом і передаточною функцією
 . .
|
При способі прямого програмування, розділивши чисельник і знаменник передаточної функції на  (у загальному випадку на
(у загальному випадку на  ), отримаємо
), отримаємо
| (31.1) |
За визначенням передаточної функції
 . .
|
Введемо нову змінну e[kT], Z -перетворення якої має вигляд
 . .
|
Тоді

|
або

|
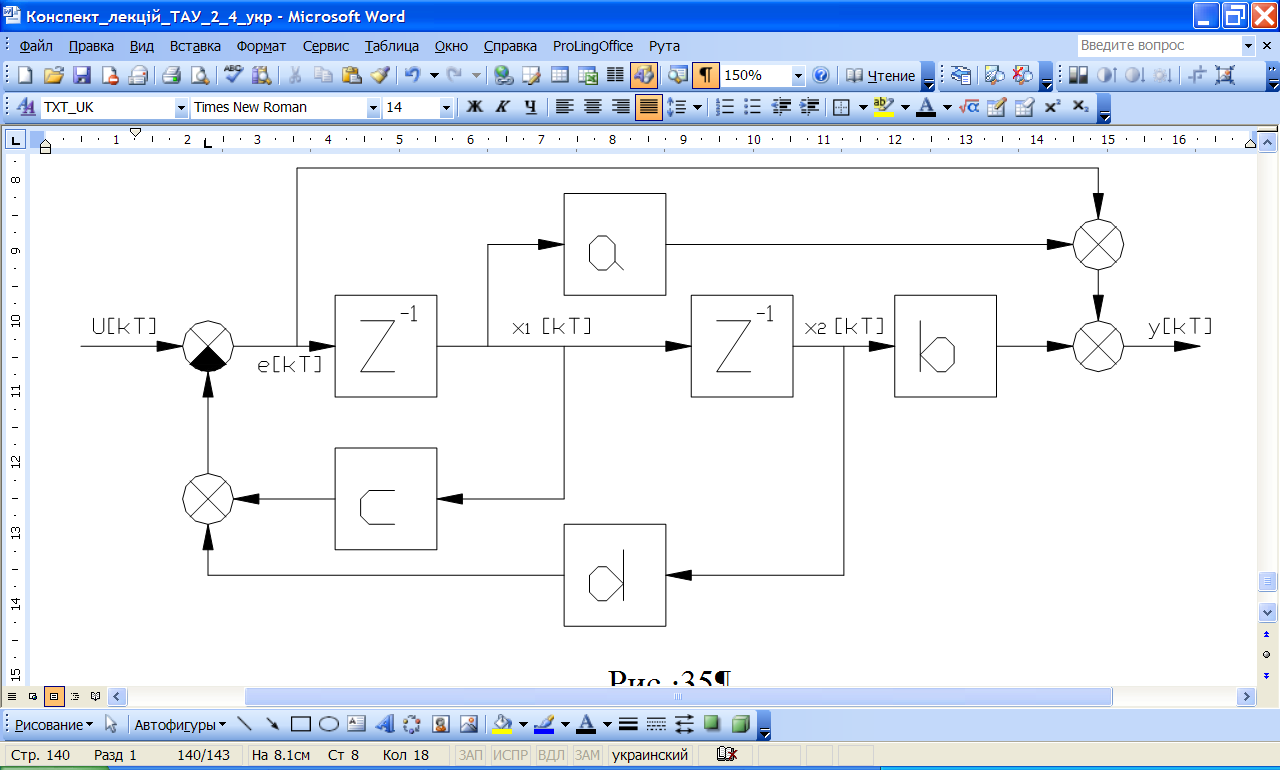
Відповідно до виразу (31.1) складаємо схему моделювання (рис.31.1). При цьому враховуємо, що множник  відповідає затримці змінної на один такт квантування.
відповідає затримці змінної на один такт квантування.
|
| Рис. 30.1. Схема моделювання (метод прямого програмування) |
Рівняння стану системи можна отримати, записуючи співвідношення, що зв'язують координати на виходах елементів затримки. У результаті маємо
 , ,
 . .
| (31.2) |
Оскільки

|
і при цьому
 , ,
|
то для вихідний змінної у[kT] отримаємо рівняння

| (31.3) |
Таким чином, рівняння у просторі станів приймають вигляд (31.2). (31.3), а матриці Ф, Н, C, D визначаються виразами

|
Запис системи рівнянь для загального випадку не представляє складності. При цьому матриця Ф матиме структуру, аналогічну власній матриці системи диференціальних рівнянь, записаних в першій нормальній формі Коші.
Дата добавления: 2017-08-01; просмотров: 272;