Загальні відомості про АСУТП ГМС. Технологічні процеси гідромеліоративних систем як об’єкти автоматизації
Залежно від функцій, які виконуються спеціальними автоматичними пристроями, розрізняють наступні основні види автоматизації: автоматичний контроль, автоматичний захист, дистанційне та автоматичне керування, телемеханічне керування.
Автоматичний контроль містить у собі автоматичні сигналізацію, вимір, сортування і збір інформації.
Автоматична сигналізація призначена для оповіщення обслуговуючого персоналу про граничні або аварійні значення яких-небудь фізичних параметрів, місці та характеру порушень ТП. Сигнальними пристроями служать лампи, дзвінки, сирени та інші світлові, звукові пристрої.
Автоматичний вимір служить для виміру і передачі на спеціальні вказівні або прилади, що реєструють значення фізичних величин, які характеризують ТП або роботу машин. Обслуговуючий персонал за показниками приладів судить про якість ТП і режими роботи машин і агрегатів.
Автоматичне сортування призначене для контролю і поділу продукції за розміром, масою, твердістю, в'язкостю та іншим показникам (наприклад, сортування зерна, яєць, фруктів, картоплі і т.п.).
Автоматичний збір інформації необхідний для одержання інформації про хід ТП, якості і кількості продукції, що випускається, та для подальшої обробки, зберігання і видачі інформації обслуговуючому персоналу.
Автоматичний захист являє собою сукупність технічних засобів, які при виникненні ненормальних або аварійних режимів або припиняють контрольований виробничий процес (наприклад, відключають певні ділянки електроустановки при виникненні на них коротких замикань), або автоматично усувають ненормальні режими. Автоматичний захист тісно пов'язаний з автоматичним керуванням і сигналізацією. Він впливає на органи керування і сповіщає обслуговуючий персонал про здійснену операцію.
Автоматичний захист, виконана на основі реле, одержала назву релейної. Її застосовують на електричних станціях, підстанціях, в електричних мережах і різних електроустановках.
Пристрої автоблокування, що входять в автоматичний захист, призначені для запобігання невірних включень і відключень, помилкових дій обслуговуючого персоналу; також вони попереджають про можливі ушкодження та аварії.
Об'єктом керування (ОУ) або керованим об'єктом називають окрему сукупність елементів, у якій технологічні процеси зазнають цілеспрямованим впливам. До такої сукупності відносять поле, теплицю, сховище продукції, трактор, комбайн, рослину, тварину і т.п.
Об'єкт керування і спеціальний керуючий пристрій у цій сукупності утворюють автоматичну систему керування (СУ). Різновидом останньої є автоматична система регулювання, яку використовують для автоматичної підтримки параметрів в об'єкті на заданому рівні або зміни їх за певним законом. Автоматичне регулювання здійснюється керуючим пристроєм, який називають автоматичним регулятором.
Якщо цілеспрямований вплив здійснює людина, то таке керування називають ручним.
Дистанційне керування поєднує в собі методи і технічні засоби керування установками і різними об'єктами на відстані. Імпульси на керування (команди) подаються обслуговуючим персоналом по лініях зв'язку за допомогою відповідних кнопок, ключів і іншої командної апаратури.
Телемеханіка — галузь науки і техніки, що охоплює теорію і технічні засоби автоматичної передачі на відстань команд керування та одержання інформації про стан ОУ. Телемеханічні системи дозволяють об'єднати в один ТП роботу великої кількості машин і установок, розташованих одна від іншої на значній відстані. Залежно від призначення їх прийнято розділяти на системи телесигналізації, телевимірювання та телекерування.
Усі розглянуті поняття та системи автоматизації поєднуються у науково-технічний напрямок, який має назву технічна кібернетика.
Кібернетика — наука про керування складними процесами і системами, що розвиваються, вивчає загальні математичні закони керування об'єктами різної природи. Сфера дії кібернетики надзвичайно велика. Вона охоплює питання керування машинами, виробничими процесами та організованою діяльністю людей, фізіологічними, біохімічними і біофізичними процесами.
Залежно від ступеня автоматизації розрізняють ручне, автоматизоване та автоматичне керування. При ручному керуванні всі функції керування виконує оператор. При автоматизованому керуванні частину функцій виконує людина, а іншу частину — автоматичні пристрої. При автоматичному керуванні всі функції керування виконують автоматичні пристрої. Відповідно до цих понять прийнято розділяти системи керування на автоматизовані та автоматичні.
У сучасній автоматиці системи керування розділяють на автоматизовані системи керування виробництвом (АСКВ) і технологічними процесами (АСК ТП).
АСКВ — це людино-машинна система, що забезпечує автоматизований збір, обробку і зберігання інформації, необхідної для оптимізації керування в різних сферах, головним чином в організаційно-економічній діяльності людини, наприклад керування господарсько-плановою діяльністю галузі, підприємством, комплексом, територіальним регіоном, тобто керування системою сільськогосподарських підрозділів.
Автоматизована СК ТП — це теж людино-машинна система, що забезпечує автоматизований збір, зберігання та обробку інформації про хід виконання ТП, а також видачу керуючих впливів на ТП відповідно до прийнятого критерію керування. Звичайно АСК ТП охоплює окремі цехи, ферми, сховища, господарства в цілому. АСК ТП допомагає диспетчерові і керівникові підприємства оперативно знаходити рішення по оптимальному керуванню виробничим процесом, опираючись на показники окремих технологічних операцій.
Автоматична СК ТП являє собою сукупність автоматичних керуючих пристроїв і ОУ, взаємодіючих без особистої участі людини.
За ступенем автоматичного керування виробничими ТП розрізняють часткову, комплексну і повну автоматизацію.
Часткова автоматизація поширюється тільки на окремі виробничі операції або установки. Вона не звільняє людину від участі у виробничому процесі, але суттєво полегшує працю.
Комплексна автоматизація ТП означає автоматичне виконання всього комплексу операцій і установок по обробці матеріалів і їх транспортуванню. У цьому випадку функції людини зводяться до спостереження за виконанням процесу, його аналізу і зміні режиму роботи автоматичних пристроїв з метою досягнення найкращих техніко-економічних показників.
Повна автоматизація на відміну від комплексної покладає виконання функцій вибору та узгодження режимів роботи окремих машин і агрегатів ( як при нормальному режимі, так і в аварійних ситуаціях) не на людину, а на спеціальні автоматичні пристрої. У цьому випадку всі основні й допоміжні установки здатні працювати в автоматичному режимі протягом тривалого періоду без особистої участі людини. За обслуговуючим персоналом залишаються функції періодичного огляду, профілактичного ремонту та перебудови всієї системи на нові режими роботи.
Досвід автоматизації промисловості показує, що при частковій автоматизації витрати на засоби автоматики становлять від 1 до 10 % капітальних вкладень на установку в цілому, при комплексній — від 10 до 25 % і при повній — більше 25 %. У сільському господарстві на засоби автоматики та метрологічні прилади витрачається менше 7 %, хоча в теплицях вони становлять 15...40 % загальної вартості технологічного устаткування.
Характеристика та класифікація автоматичних систем керування.Метою керування ТП може бути: стабілізація деякої фізичної величини, зміна її по заданій програмі або, у більш складних випадках, оптимізація деякого узагальнюючого критерію: найбільша продуктивність процесу, найменша собівартість продукту і т.д.
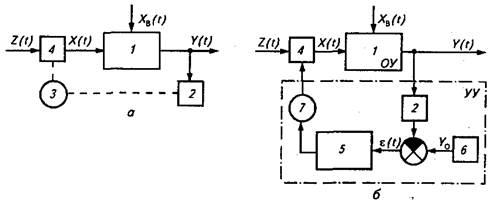
Рис. 1.1. Структурні схеми систем ручного (а) і автоматичного (б) керування:
1 — об'єкткерування; 2 — вимірювальний прилад; 3 — оператор; 4 — регулювальний орган; 5 — керуючий елемент; 6 — задатчик; 7 — виконавчий механізм.
У найпростішому випадку (рис. 1.1, а) керування ТП здійснюється оператором 3, який на підставі свого досвіду та орієнтуючись за показниками контрольно-вимірювальних приладів 2 оцінює хід процесу за вихідних параметрами Y(t) і вживає заходів впливу X(t) з метою усунення впливу зовнішніх збурювань ХВ (t), що діють на об'єкт керування 1. Природно, результати ТП у цьому випадку залежать від кваліфікації і сумлінності оператора.
Структурні схеми автоматичних СК представляють у вигляді ланцюжка елементів, кожний з яких підданий дії одного або декількох вхідних впливів, у результаті чого змінюються вихідні параметри цього елемента.
Структурні схеми автоматичних СК (мал. 1.1, б) у найпростішому випадку містять у собі два елементи: об'єкт 1 керування (разом з регулючим органом 4)і керуючий пристрій (КП). У схему КП входять вимірювальний перетворювач (датчик) 2, що вимірює регульовану величину та перетворює її в певний сигнал певної фізичної природи (електричну, механічну та ін.); задатчик 6; керуючий елемент 5, що підсилює і перетворює відхилення керованої величини Y(t) від заданого значення Y0 відповідно до закладеного в нього алгоритму; виконавчий механізм 7, який виконує команду керуючого елемента 5 при зміні положення регулювального органа 4, який здійснює керування витратою речовини або енергії в ОК.
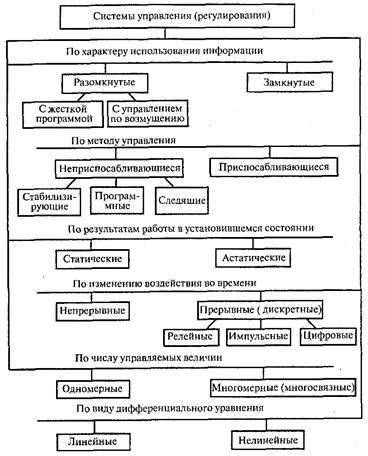
Рис. 1.2. Класифікація автоматичних систем керування (регулювання)
На вхід керуючого елемента (регулятора) 5 подається сигнал, за значенням рівний різниці e(t) поточного значення керованої величини Y(t) і її заданого значення Y0. Керована величина Y(t) перебуває під дією одного або декількох впливів, які обурюють ХВ(t), частина яких може контролюватися.
Класифікація автоматичних СК можлива за різними ознаками, наприклад так, як це показано на рис. 1.2. Автоматичні СУ діляться на замкнені і розімкнені.
Замкнені системи використовують поточну інформацію про вихідні величини, визначають відхилення e(t) керованої величини Y(t) від її заданого значення Y0 і ухвалюють дії до зменшення або повного виключення e(t). Найпростішим прикладом замкненої системи, називаною системою регулювання по відхиленню, служить показана на рис. 1.3, а система стабілізації рівня води в баку. Система складається з вимірювального перетворювача (датчика) 2 рівня, пристрою 1 керування (регулятора) і виконавчого механізму 3, якийуправляє положенням регулювального органа (клапана) 5.
Ознака замкненої системи, що діє на відхилення регульованої величини, — зворотний зв'язок з виходу ОК на його вхід. Замкнені системи цього типу компенсують будь-які збурювання, оскільки регулятор контролює тільки відхилення регульованої величини незалежно від причини. Вони не можуть забезпечити рівність вихідної величини Y(t) заданому значенню Y0 протягом усього часу t керування, тому що їхній принцип роботи пов'язаний з наявністю відхилення e(t)=Y(t) - Y0.
Розімкнені автоматичні СК підрозділяють на системи із твердою програмою і з керуванням по збурюванню. Приклад систем першого типу — система автоматичного пуску та зупинки комплексу машин, що входять у технологічну лінію, у якій повинна витримуватися певна послідовність (програма) роботи окремих механізмів, при цьому ЗЗ із виходу об'єкта на його вхід відсутній.
У розімкнених автоматичних СК, що діють по збурюванню, керування здійснюється на підставі інформації про вхідні (збурюючі) впливи. У показаній на рис. 1.3, б системі таким збурюванням є зміна тиску води в трубопроводі, що подає.
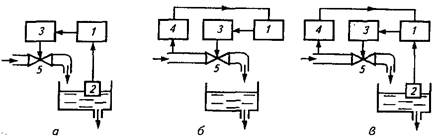
Рис. 1.3. Функціональні схеми автоматичних СУ з керуванням по відхиленню (а), по збурюванню (б) і комбіновані (в):
1 — регулятор; 2 і 4 — вимірювальні перетворювачі рівня і тиску води; 3 — виконавчий механізм; 5 — регулювальний орган.
У реальних системах можлива компенсація одного або декількох збурювань, що піддаються виміру. Якщо таких збурювань небагато, то для компенсації кожного з них необхідний свій контур регулювання. При цьому завжди залишиться частина збурювань, у тому числі випадкових і неконтрольованих, які можуть викликати відхилення регульованої величини Y(t) від заданої Y0.
Вихід із цього — комбінація обох принципів керування (по збурюванню та відхиленню). Таку систему називають комбінованою (рис. 1.3, в), і її перевага в порівнянні із системою, що діє по відхиленню, у кращій стабілізації регульованої величини.
Стабілізуючі системи підтримують керовану величину на заданому рівні, програмні — змінюють керовану величину по заданій програмі та системи, що стежать — забезпечують вимір керованої величини в певному співвідношенні до впливу, який задається.
За методом керування автоматичні СК підрозділяться на адаптивні та непристосні до змін умов роботи ОК.
Адаптивні автоматичні СК цілеспрямовано змінюють алгоритми керування або параметри керуючих впливів для досягнення найкращого керування об'єктом. Оскільки в процесі роботи таких систем відбувається зміна їх алгоритмів і (або) структури, то їх називають також самонастроювальними. Окремий випадок систем, що пристосовуються, — екстремальні, завдання яких — автоматичний пошук максимуму або мінімуму керованої величини.
Наступна ознака класифікації пов'язана з результатом роботи системи у стані, що встановився. Відповідно до нього автоматичні СК діляться на статичні та астатичні.
У статичних системах по закінченню перехідного процесу існує різниця між заданим значеннями керованої величини та тими, що установилися, яку ы називають статичною похибкою. Статична похибка ΔYст — неодмінна ознака таких систем, причому її величина залежить як від величини збурювання, так і від параметрів регулятора.
В астатичних системах керована величина по закінченню перехідного процесу дорівнює заданому значенню.
По характеру зміни керуючих впливів у часі автоматичні СК ділять на безперервні і переривчасті, або дискретні.
У безперервних системах керована величина і керуючий вплив — безперервні функції часу.
Дискретні автоматичні СК підрозділяють на релейні, імпульсні і цифрові.
У релейних (позиційних) системах один з елементів, звичайно це керуючий пристрій (КП), має суттєво нелінійну (релейну) характеристику, відповідно до якої керуючий вплив змінюється стрибкоподібно при певному значенні керованої величини.
Імпульсні автоматичні СК мають у своєму складі ланку, що перетворює керовану величину в дискретну імпульсну. При цьому керованій величині пропорційна амплітуда або тривалість імпульсів.
У цифрових системах формування керуючих впливів здійснюється цифровими обчислювальними пристроями, які оперують не з безперервними сигналами, а з дискретними числовими послідовностями.
Наступна ознака класифікації — число керованих величин. Відповідно до цієї ознаки автоматичні СК ділять на одномірні і багатомірні. Одномірні мають по одній вхідній і вихідній величині, а багатомірні — декілька.
По виду диференціального рівняння автоматичні СК підрозділяють на лінійні та нелінійні. До лінійних відносять системи, поведінка яких описується лінійними диференціальними рівняннями. Оскільки систем, які б абсолютно точно описували лінійні диференціальні рівняння, практично не існує, тому відносять також лінеаризовані системи, які описуються лінійними диференціальними рівняннями приблизно, при деяких допущеннях і обмеженнях. До нелінійних відносять системи, поведінка яких описується нелінійними диференціальними рівняннями, причому в системі досить мати всього один нелінійний елемент, щоб уся вона стала нелінійною.
Особливості автоматизації сільськогосподарського виробництва.Автоматизація сільського господарства опирається на багатий досвід промисловості. Разом з тим до методів і засобів автоматизації, які застосовуються у тваринництві та рослинництві, висувають специфічні вимоги, обумовлені особливостями сільськогосподарського виробництва.
На відміну від промисловості в сільському господарстві поряд з технікою використовують ґрунт і живий організми, машинна технологія тісно переплітається та погоджується з біологічними процесами.
Виробничі процеси в сільському господарстві складні і різноманітні, мають великий обсяг технологічної інформації і тісний взаємозв'язок. Це обумовлює велику різноманітність ТП.
Система машин, розроблена для сільського господарства, має близько трьох тисяч найменувань по типах, майже 60 % з яких призначені для рільництва й близько 30 % — для тваринництва і птахівництва.
Немаловажні особливості — розположеність сільськогосподарської техніки по великих площах і значної відстані від ремонтної бази, відносно мала потужність установок, тихохідність і невисока кваліфікація обслуговуючого персоналу, а також сезонність їх роботи і нетривале використання протягом доби. Навіть у тваринництві, де операції відбуваються і повторюються щодня за певним циклом, загальне число годин роботи машин у добу відносно невелике. Отже, засоби автоматики повинні бути дуже різноманітними, відносно дешевими, простими за будовою і надійними в експлуатації.
Основна особливість сільськогосподарського виробництва полягає в нерозривному зв'язку техніки з біологічними об'єктами (тваринами і рослинами), для яких характерні безперервність процесів утвору продукції та циклічність її одержання, неможливість збільшення випуску продукції за рахунок прискорення виробництва. У цих умовах автоматика повинна працювати надійно, тому що такий процес не можна перервати і практично неможливо надолужити упущене шляхом інтенсифікації наступного періоду. Наприклад, автоматика у тваринництві повинна забезпечити циклічність виконання технологічних операцій протягом доби незалежно від погодних умов. Багато об'єктів сільськогосподарської автоматики мають контрольовані та регульовані параметри. Наприклад, у нагрівальних установках і сушарках, зерносховищах і овочесховищах, теплицях і тваринницьких приміщеннях необхідно по всьому об'єкту контролювати параметри (температуру, вологість, освітлення і т.п.) і управляти ними. Для таких об'єктів системи автоматики повинні мати оптимальне число первинних перетворювачів (датчиків) і виконавчих органів і в той же час забезпечити керування параметрами у всіх розосереджених зонах із заданою точністю й надійністю.
Тому умови роботи засобів автоматики у сільському господарстві дуже важкі та імовірність виникнення несправностей значно вища, ніж в інших галузях народного господарства.
Внаслідок перерахованих особливостей і ряду інших причин методи й засобу автоматизації й вимоги до них у сільськім господарстві значно відрізняються від промислових.
При розробці пристроїв автоматики сільських установок їх необхідно розраховувати на широкі межі зміни параметрів навколишнього середовища. Це дозволить дістати високонадійні кошти, тому що найбільш ефективні заходи боротьби за підвищення надійності пристроїв автоматики — вибір елементів з малою небезпекою відмов і різні способи збільшення надійності при проектуванні. Зазначені специфічні особливості в першу чергу впливають на первинні перетворювачі (датчики) і виконавчі органі автоматики, установлювані безпосередньо на об'єктах автоматизації несприятливі умови, що й випробовують усі, навколишнього середовища. Інші вузли автоматики можна розташовувати в окремих приміщеннях або спеціальних шафах, що виключають несприятливий вплив навколишнього середовища.
Типові технічні рішення при автоматизації технологічних процесів.Спільне завдання керування ТП — це мінімізація (максимізація) деякого критерію (собівартість, витрати енергії і т.д.) при виконанні обмежень на технологічні параметри, що накладаються регламентом.
Оскільки рішення цієї задачі для всього процесу в цілому важко (багато факторів, що впливають), увесь ТП слід розбити на окремі ділянки, причому ділянка відповідатиме закінченій технологічній операції, що має свою підзадачу (готування корму, обробка молока і т.д.).
Для окремого ТП критерій оптимальності стає простішим. Це може бути вимога стабілізації параметра або, що нескладно обчислюємого критерію. На підставі прийнятого критерію оптимальності для окремого ТП легко формується завдання автоматизації. Крім критерію оптимальності для рішення цього завдання необхідний аналіз об'єкта автоматизації з погляду виявлення всіх істотних вхідних і вихідних змінних, а також аналіз статичних і динамічних характеристик каналів передачі обурюючих і керуючих впливів.

Рис. 2.3. Схеми регулювання витрат: а — рідких і газоподібних середовищ; б — сипучих матеріалів; в — співвідношення середовищ.
Технологічні процеси одного типу (наприклад, процеси нагрівання) можуть відрізнятися виконанням апаратури, фізико-хімічними властивостями потоків сировини і т.д. Однак усі вони протікають по тим самим законах і підкоряються загальним закономірностям. Характер цих закономірностей у першу чергу визначається тим, який параметр бере участь у керуванні. Для одного класу процесів, що протікають у типовій технологічній системі, може бути розроблене типове рішення по автоматизації, що є прийнятним для широкого кола систем. Наявність типове рішення значно спрощує завдання побудови АСК.
До типових технологічних параметрів, що підлягають контролю й регулюванню, відносять витрати, рівень, тиск, температуру і ряд показників якості.
Регулювання витрат.Системи регулювання витрат характеризуються малою інерційністю і частою пульсацією параметра.
Звичайне керування витратами — це дроселювання потоку речовини за допомогою клапана або шибера; зміна напору в трубопроводі за рахунок зміни частоти обертання привода насоса або ступеня байпасировання (відведення частини потоку через додаткові канали).
Принципи реалізації регуляторів витрати рідких і газоподібних середовищ показано на малюнку 2.3, а, сипучих матеріалів — на малюнку 2.3, б.
У практиці автоматизації ТП зустрічаються випадки, коли потрібна стабілізація співвідношення витрат двох або більш середовищ.
У схемі, показаної на малюнку 2.3, е, потік  — ведучий, а потік
— ведучий, а потік  — ведений, де
— ведений, де  — коефіцієнт співвідношення витрат, який установлюють у процесі статичного настроювання регулятора.
— коефіцієнт співвідношення витрат, який установлюють у процесі статичного настроювання регулятора.
При зміні ведучого потоку регулятор FF пропорційно змінює ведений потік  .
.
Вибір закону регулювання залежить від необхідної якості стабілізації параметра.
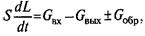
Регулювання рівня. Системи регулювання рівня мають ті ж особливості, що і системи регулювання витрати. У загальному випадку поведінка рівня описується диференціальним рівнянням
 (2.1)
(2.1)
де  — площа горизонтального перетину ємності;
— площа горизонтального перетину ємності;  — рівень;
— рівень;  ,
,  — витрати середовища на вході й виході;
— витрати середовища на вході й виході;  — кількість середовища, що збільшується або зменшується в ємності (може бути рівно 0) в одиницю часу t.
— кількість середовища, що збільшується або зменшується в ємності (може бути рівно 0) в одиницю часу t.
Сталість рівня свідчить про рівність кількостей подаваної рідини, що й витрачається. Ця умова може бути забезпечена впливом на подачу (мал. 2.4, а) або витратою (мал. 2.4, б) рідини. У варіанті регулятора, показаному на малюнку 2.4, в, використовують для стабілізації параметра результати вимірів подачі і витрати рідини. Імпульс за рівнем рідини — коригувальний, він виключає нагромадження помилки внаслідок неминучих погрішностей, що виникають при зміні подачі й витрати. Вибір закону регулювання також залежить від необхідного якості стабілізації параметра. При цьому можливо використання не тільки пропорційних, але також і позиційних регуляторів.
Регулювання тиску. Сталість тиску, як і сталість рівня, свідчить про матеріальний баланс об'єкта.
У загальному випадку зміна тиску описується рівнянням, аналогічним формулі (2.1),
 (2.2),
(2.2),
де V- обсяг апарата; р — тиск.
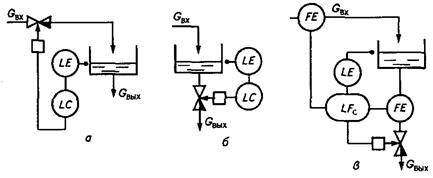
Рис. 2.4. Схеми систем регулювання рівня:
а — із впливом на подачу; б і в — із впливом на витрату середовища.
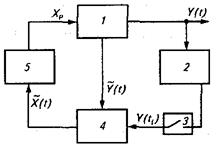
Рис. 2.5. Схема системи регулювання якості продукту:
1 — об'єкт; 2 — аналізатор якості; 3 — екстраполяційний фільтр; 4 — обчислювальний пристрій; 5 — регулятор.
Аналогічність рівнянь (2.1) і (2.2) свідчить про те, що способи регулювання тиску аналогічні способам регулювання рівня.
Регулювання температури. Температура — показник термодинамічного стану системи. Динамічні характеристики системи регулювання температури залежать від фізико-хімічних параметрів процесу і конструкції апарата. Особливість такої системи — значна інерційність об'єкта та нерідко вимірювального перетворювача.
Принципи реалізації регуляторів температури аналогічні принципам реалізації регуляторів рівня (мал. 2.4) з урахуванням керування витратою енергії в об'єкті.
Вибір закону регулювання залежить від інерційності об'єкта; чим вона більше, тим закон регулювання складніше. Постійна часу вимірювального перетворювача може бути знижена за рахунок збільшення швидкості руху теплоносія, зменшення товщини стінок захисного чохла (гільзи) і т.д.
Регулювання параметрів складу і якості продукту. При регулюванні складу або якості продукту можлива ситуація, коли параметр (наприклад, вологість зерна) вимірюють дискретно. У цій ситуації неминучі втрата інформації і зниження точності динамічного процесу регулювання. Рекомендована схема регулятора, що стабілізує деякий проміжний параметр Y(t), значення якого залежить від основного регульованого параметра — показника якості продукту Y(ti), показано на малюнку 2.5. Обчислювальний пристрій 4, використовуючи математичну модель зв'язку між параметрами Y(t) і Y(ti), безупинно оцінює показник якості. Екстраполяційний фільтр 3 видає оціннений параметр якості продукту Y(ti) у проміжках між двома вимірами.
Дата добавления: 2017-01-29; просмотров: 1888;