Розділ 2 Технічні засоби АСУТП ГМС
Загальні відомості про прилади й засоби автоматизації технологічних процесів.З метою уніфікації технічних систем контролю та регулювання ТП різних галузей народного господарства створена Державна система промислових приладів і засобів автоматизації (ДСП).
Функціональна схема ДСП включає кілька груп приладів і пристроїв:
· для одержання інформації про стан ТП;
· приймання, перетворення й передачі інформації з каналів зв'язку;
· перетворення, зберігання та обробки інформації і формування команд керування;
· використання командної інформації з метою впливу на ОК.
Функціональна структура ДСП складається з декількох галузей. Функціонально-цільова структура електричної галузі ДСП, що одержала найбільше поширення в сільськогосподарському виробництві, показано на малюнку 4.1. Цю галузь ділять на п'ять рівнів (груп) технічних засобів:
I — технічні засоби безпосередньої взаємодії з об'єктом автоматизації, що перетворюють параметри в уніфікований електричний сигнал (засобу контролю й сигналізації) або уніфікований сигнал у керуючий вплив на процес (виконавчі органі);
II — вторинні прилади і регулятори із вбудованим датчиком для простих локальних систем автоматизації;
III — засоби централізованого контролю, регулювання та керування для складних систем автоматизації (АСК ТП), що відрізняються наявністю цифрової обробки інформації;
IV — засоби контролю, регулювання та керування для централізованих АСК ТП на базі керуючої обчислювальної техніки телемеханіки;
V — засоби обчислювальної техніки для розв'язання завдань автоматизації процесів організаційно-економічного керування виробництвом і підприємствами.
У сільськогосподарській автоматиці мобільних машин і агрегатів використовують також технічні гідравлічні засоби:
I — засоби перетворення для одержання інформації та впливу на процес;
II — засоби контролю та регулювання для простих локальних систем автоматизації.
Між технічними засобами електричної і гідравлічної гілок нерідко існують зв'язки із взаємним обміном уніфікованими сигналами завдяки застосуванню електрогідравлічних (ЕГП) і гідроелектричних перетворювачів (ГЕП). Це дає можливість вибрати оптимальну структуру технічних засобів із пристроїв різних галузей ДСП.
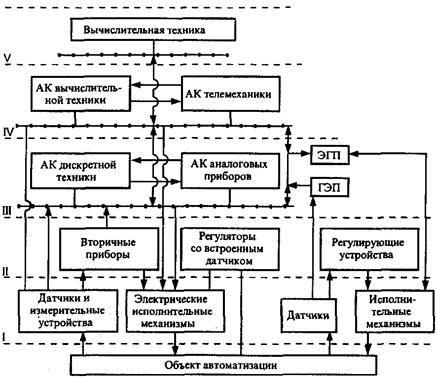
Рис. 4.1. Функціонально-цільова структура електричної галузей ГСП: АК — агрегатний комплекс
Найпростіший варіант структури гідравлічної гілки — група приладів, що працюють без допоміжної енергії, що полягає з регуляторів прямої дії.
Вхідні та вихідні сигнали приладів, що входять у ДСП, уніфіковані:
сигнал постійного струму 0...5; 5...0...5; 0...20 мА;
сигнал напруги постійного струму 0...1; 1...0...1; 0...10; 10...0...10В;
сигнал напруги змінного струму частотою 50 і 400 Гц 0...0.25; 0 - 0,5; 0...1; 0...2 В;
пневматичний сигнал з межами зміни тиску 0,02...0,1 Мпа.
Крім приладів, що входять у ДСП, у сільськогосподарській автоматиці діє велика кількість технічних засобів, що оперують неуніфікованими сигналами вимірювальної інформації. Ці технічні засоби вписуються тільки в I і II рівні функціонально-цільової структури.
У цій главі дана характеристика групи технічних засобів, що є основою всіляких автоматичних систем сільськогосподарського призначення. Основну увагу приділяють не конструктивним і метрологічним характеристикам устаткування, досліджуваним у спеціальних курсах, а статичним і динамічним характеристикам, використовуваним при синтезі автоматичних СК. Результати залежать також від вибору вимірювального пристрою, виконавчого механізму (ВМ) і регулювального органа (РО).
Тема 2.1 Датчики
Вимірювальні перетворювачі та пристрої.Вимірювальний пристрійрегулятора, як і всяка ланка контуру регулювання, характеризується залежністю між вихідний і вхідний величинами в усталеному та перехідному режимах. В усталеному режимі ця залежність характеризує статичну характеристику пристрою. Бажано, щоб статична характеристика вимірювального пристрою в робочому діапазоні зміни регульованої величини була лінійною.
Вимірювальний пристрій у порівнянні з об'єктом керування (ОК) повинен мати мінімальні запізнювання та постійну часу. Потужність, що розвивається вимірювальним пристроєм, повинна бути більше потужності, необхідної для переміщення РО регулятором прямої дії, або достатньої для нормальної роботи регулятора непрямої дії.
Тип вимірювального пристрою автоматичного регулятора визначається:
видом регульованого параметра (тиск, температура, швидкість і т.п.);
фізичною природою перетвореного сигналу (температура середовища в електричний імпульс, у механічний вплив і т.д.);
необхідною точністю підтримки регульованого параметра;
залежністю показань від умов виміру (запиленість середовища, вібрація і т.п.).
Далі розглянемо принцип дії, особливість конструкції, а також характеристики пристроїв для виміру тиску й розрідження, температури, рівня, витрати, переміщення та частоти обертання, застосовуваних у практиці автоматизації ТП сільськогосподарського виробництва.
Вимір тиску та розрідження.Його проводять в основному за допомогою механічних пристроїв (пружини, мембрани, сильфони), якы деформуються або переміщуються на величину, що пропорційна величині вимірюваного параметра (табл. 4.1). Статична характеристика пристроїв цього типу

де  — еквівалентна площа пружного елемента, м2; р — контрольований тиск, Н/м2; К — твердість пружного елемента, м/Н.
— еквівалентна площа пружного елемента, м2; р — контрольований тиск, Н/м2; К — твердість пружного елемента, м/Н.
Динамічні характеристики механічного вимірювача тиска описуються передатною функцією (ПФ) інерційною або, якщо маса рухливих частин значна, коливальною ланкою. Постійна часу інерційної ланки  , де
, де  — коефіцієнт тертя середовища, тиск якої вимірюють у Н с/м2.
— коефіцієнт тертя середовища, тиск якої вимірюють у Н с/м2.
Для виміру різниці тисків використовують диференціальні манометри, вихідна величина яких пропорційна різниці контрольованих тисків р1 - р2. Механічні вимірювачи застосовують для контролю тиску від 10-2 до 100 МН.
Для дуже малих тисків зручні дзвонові манометри. У динамічному відношенні вони також еквівалентні механічним. Коефіцієнт перетворення вимірювача

де  та
та  — площі посудини і стінок дзвона, м2;
— площі посудини і стінок дзвона, м2;  — щільність рідини, кг/м3.
— щільність рідини, кг/м3.
Крім механічних застосовують електричні вимірники тиску, що використовують тензодатчики, п’езорезистори, магніто-пружні елементи і т.д. У динамічнім відношенні ці вимірювачи відповідають безінерціним ланкам, коефіцієнт перетворення посилення яких визначається конструктивними особливостями вимірника.
Вимір температури. Його проводять на основі залежності деяких фізичних параметрів вимірника від температури (табл. 4.1). Робота цієї групи перетворювачів заснована на тепловому розширенні твердих тіл, рідин або газів (біметалічні, дилатометричні, манометричні вимірники), на зміні опору провідників і напівпровідників (терморезистори) або зміні термоерс фізичної природи, що виникає у двох провідниках різної, при наявності різниці температур у крапках їх з'єднання (термопара).
Діапазон виміру платинових терморезисторів — від - 220 до 500 0С, мідних — від -50 до 180 0С. Статична характеристика металевих терморезисторів у робочому діапазоні вимірюваних температур практично лінійна. Коефіцієнт перетворення для мідних терморезисторів гр. 50М и 100М відповідно 0,214 і 0,428 Ом/0С, платинових гр. 50П и 100П відповідно 0,196 і 0,391 Ом/0С.
Напівпровідникові терморезистори використовують для виміру температури від -90 до 1800С. На відміну від металевих статична характеристика напівпровідникових терморезисторів нелінійна, її крутість (коефіцієнт перетворення) зі збільшенням температури падає. Істотний недолік таких вимірювальних перетворювачів — відсутність взаємозамінності, тому їх градуїровка індивідуальна.
Термоелектричні вимірювальні перетворювачі (термопари), як і металеві терморезистори, мають лінійну статичну характеристику. Коефіцієнт перетворення найпоширеніших з них:
хромель-алюмель — 41•10-3 мВ/0С;
хромель-копель — 69,5•10-3 мВ/0С;
мідь-константан — 47,5•10-3 мВ/0С.
Діапазон виміру хромель-алюмелевих термопар від -50 до 100 °С, а хромель-копелевих — від -50 до 600 0С.
У динамічнім відношенні передатні функції вимірників температури розповсюджених типів можуть бути аппроксимовані послідовно включеними інерційним і ланками запізнення
Параметри  , Т и
, Т и  в основному залежать від конструкції перетворювача, наприклад, для термопар — від товщини й довжини металевої гільзи (чохла), що захищає вимірювальний перетворювач від механічних впливів або від контактів з вимірюваним середовищем. Так, постійна часу Т перебуває звичайно в діапазоні від 2 до 10 хв.
в основному залежать від конструкції перетворювача, наприклад, для термопар — від товщини й довжини металевої гільзи (чохла), що захищає вимірювальний перетворювач від механічних впливів або від контактів з вимірюваним середовищем. Так, постійна часу Т перебуває звичайно в діапазоні від 2 до 10 хв.
Робота дилатометричних і біметалічних вимірювальних перетворювачів заснована на відмінності коефіцієнтів теплового розширення твердих тіл, з яких виконані чутливі елементи. У дилатометричному перетворювачі за значенням переміщення вільного кінця стрижня судять про температуру  вимірюваного середовища.
вимірюваного середовища.
Вільний кінець біметалічного перетворювача звивається убік металу звичайно з меншим коефіцієнтом лінійного розширення. Статична характеристика біметалічного перетворювача нелінійна. Його динамічні характеристики відповідають характеристикам інерційної ланки.
У манометричному перетворювачі зміна температури навколишнього середовища викликає зміна тиску в замкненій системі, заповненою рідиною, парорідинною сумішшю або газом. За значенням переміщення кінця манометричної пружини судять про температуру середовища, у яке поміщений термобаллон. Статична характеристика цього вимірювального перетворювача також нелінійна. У динамічному відношенні він подібний до інерційної ланки.
Клас точності манометричних термометрів становить 1,0...2,5. Діапазон вимірюваних температур -160...600°С. Довжина капіляра, що зв'язує термобаллон з манометричною пружиною, до 60 м.
Вимір рівня. Найчастіше його здійснюють за допомогою поплавця, щільність якого менше щільності рідини, або заглибного поплавця, щільність якого більше, ніж щільність рідини (табл. 4.1). У першому випадку поплавець стежить за рівнем рідини, у другому пристрій діє за принципом виміру сили, що виштовхує, діє на поплавець.
Крім поплавкових застосовують також вимірники, що використовують масу посудини з рідиною, гідростатичний тиск або залежність електричного опору від рівня контрольованої рідини.
У динамічнім відношенні вимірники рівня еквівалентні коливальним ланкам або безінерціоним ланкам  з коефіцієнтом перетворення К, обумовленим конструкцією пристроя.
з коефіцієнтом перетворення К, обумовленим конструкцією пристроя.
Вимір витрати. Це одне із самих складних і відповідальних видів виміру (табл. 4.1). Витрату вимірюють у масових (  , кг/с) або об'ємних (V, м3/с) одиницях. Зв'язок між ними визначається співвідношенням
, кг/с) або об'ємних (V, м3/с) одиницях. Зв'язок між ними визначається співвідношенням  , де — щільність вимірюваного середовища, кг/м3.
, де — щільність вимірюваного середовища, кг/м3.
Витрата рідини або газу при  можна виміряти за допомогою спеціально встановлюваного в трубопроводі пристрою, перепад тиску
можна виміряти за допомогою спеціально встановлюваного в трубопроводі пристрою, перепад тиску  на якому пропорційний витраті середовища. Цей перепад виміряється диференціальним манометром. Витратомір цього типу називають дросельним. У динамічнім відношенні він еквівалентний безінерціній ланці з коефіцієнтом перетворення
на якому пропорційний витраті середовища. Цей перепад виміряється диференціальним манометром. Витратомір цього типу називають дросельним. У динамічнім відношенні він еквівалентний безінерціній ланці з коефіцієнтом перетворення

де С — коефіцієнт, значення якого залежить від геометричної форми і розмірів пристрою, діаметра трубопроводу та щільності вимірюваного середовища.
Очевидно, статична характеристика цього вимірювального пристрою нелінійна.
Для виміру кількості речовини  , кг, використовують швидкісні або об'ємні лічильники, робочий орган яких — крильчатка, що обертається потоком рідини. Кількість середовища, що проходить через трубопровід, пропорційна частоті обертання крильчатки, вимірюваної інтегруючим приладом.
, кг, використовують швидкісні або об'ємні лічильники, робочий орган яких — крильчатка, що обертається потоком рідини. Кількість середовища, що проходить через трубопровід, пропорційна частоті обертання крильчатки, вимірюваної інтегруючим приладом.
Принцип дії лічильників газу аналогічний, але їх робчий орган має іншу конструкцію, наприклад, у вигляді двох обертових овальних шестірень.
Об'ємна витрата рідини або газу можна також визначити по швидкості їх руху за допомогою пневмометричної трубки. Останню розташовують по осі трубопроводу назустріч потоку. Вона сприймає динамічний напір , рівний різниці між повним і статичним напором.
Динамічний напір вимірюють диференціальним манометром. Він служить для обчислення швидкості у вимірюваній крапці перетину.
Пристрої цього типу використовують для виміру витрати рідин або газів у трубопроводах більших діаметрів і некруглого перетину.
Вимір переміщення. Його здійснюють за допомогою датчиків потенціометричного типу, різних електромашинних пристроїв або індуктивних перетворювачів (табл. 4.1).
Перетворювачі потенціометричного типу включають у мостову схему, що живиться постійним або змінним струмом.
Електромашинний перетворювач — сельсин являє собою мініатюрну електричну машину, зі статора та ротора. На статорі звичайно розташовують три обмотки, зрушені в просторі на 120° по відношенню одна до іншої; а на роторі — одну обмотку. При використанні сельсинів у трансформаторному режимі однойменні затискачі обмоток статорів сельсинів датчика й приймача з'єднують між собою. На обмотку ротора сельсина-датчика подають напруга змінного струму  , а з ротора сельсина-приймача знімають напругу
, а з ротора сельсина-приймача знімають напругу  , значення якої пропорційна синусу кута неузгодженості роторів. При цьому погодженим є положення, при якому осі обмоток роторів сельсинів зрушені на 90°.
, значення якої пропорційна синусу кута неузгодженості роторів. При цьому погодженим є положення, при якому осі обмоток роторів сельсинів зрушені на 90°.
Диференційно-трансформаторні перетворювачі мають три обмотки, одна з них, первинна, живиться змінним струмом , а дві інші, вторинні, включені назустріч одна до іншої. При середньому положенні плунжера напруга на вторинних обмотках дорівнює нулю. При відхиленні плунжера від середнього положення на виході датчика з'являється напруга змінного струму, значення й фаза якого залежать від значення та напрямку відхилення.
Статична характеристика диференційно-трансформаторного перетворювача в межах робочого діапазону лінійна.
Диференційно-трансформаторні перетворювачі — універсальні перетворювачі переміщення в електричний сигнал для великої групи вимірників витрати, тиску, рівня й інших параметрів.
У динамічнім відношенні всі перетворювачі переміщення являють собою безінерціні ланки. Коефіцієнт їх перетворення
де — напруга живлення схеми, В;  — опір навантаження, Ом;
— опір навантаження, Ом;  — повний опір перетворювача, Ом.
— повний опір перетворювача, Ом.
Коефіцієнт перетворення, В/рад, сельсиної пари в трансформаторному режимі
де  — максимальна вихідна напруга, В.
— максимальна вихідна напруга, В.
Коефіцієнт перетворення, В/мм, диференційно-трансформаторного перетворювача

де  та
та  — число витків первинної та вторинної обмоток перетворювача;
— число витків первинної та вторинної обмоток перетворювача;  -значення вхідної величини.
-значення вхідної величини.
Вимір частоти обертання. Його проводять за допомогою механічних, гідравлічних, індукційних, частотних і електричних пристроїв (табл. 4.1).
До механічних вимірників частоти обертання відносять відцентрові тахометри. При обертанні вала тахометра на вантажі діє відцентрова сила, під дією якої вони розходяться, деформуючи пружину й переміщаючи муфту.
У динамічнім відношенні відцентрові тахометри — коливальні ланки.
Параметри їх передатних функцій залежать від конструкції вимірювального пристрою.
До механічних вимірників відносять також гіроскопи.
Гідродинамічні вимірники перетворять кутову швидкість обертання в тиск рідини, створюване насосом.
В індукційних вимірниках вхідний вал з'єднаний з постійним магнітом. При обертанні магніту в металевому диску индукцюється ЕРС, яка породжує вихрові струми. Від їхньої взаємодії з полем постійного магніту виникає момент обертання, значення якого пропорційно частоті обертання вхідного вала.
Дія електромашинних вимірників частоти обертання (електричних тахометрів) засноване на залежності, що розвивається генератором постійного струму ЕРС від частоти обертання ротора  .
.
У динамічнім відношенні електричний тахометр подібний безінерційній ланці з коефіцієнтом перетворення
 ,
,
де  — коефіцієнт, що залежить від конструкції; числа пар полюсів, числа провідників обмотки якоря й числа паралельних галузей; Ф — магнітний потік, Вб.
— коефіцієнт, що залежить від конструкції; числа пар полюсів, числа провідників обмотки якоря й числа паралельних галузей; Ф — магнітний потік, Вб.
Звичайне значення коефіцієнта передачі тахогенератора перебуває в межах 0,06...1,15 Вс/рад.
При вимірі частоти обертання робочих органів мобільних сільськогосподарських агрегатів часто застосовують імпульсні вимірники швидкості, що перетворять кутову швидкість у частоту проходження імпульсів деякого значення (струму, світлового потоку, випромінювання і т.д.). У динамічнім відношенні ці вимірювальні пристрої також подібні безінерційній ланці з коефіцієнтом передачі  , де — число зубців або отворів обертового диска.
, де — число зубців або отворів обертового диска.
Дата добавления: 2017-01-29; просмотров: 1365;