Тема 2.2 Підсилювачі
Підсилювачіяк елементи систем автоматичного керування призначені для посилення потужності сигналів керування (або сигналу похибки) до рівня, необхідного для керування виконавчими механізмами. Підсилювач являє собою пристрій, у якому порівняно малопотужним вхідним сигналом можна управляти передачею великої потужності від джерела енергії до навантаження, тобто виконавчому механізму або іншому елементу системи автоматичного керування. Підсилювальні пристрої систем автоматичного керування і регулювання класифікуються по виду енергії первинного джерела живлення і по типу підсилювального (або розподільного) елемента.
По виду використовуваної енергії підсилювачі діляться на електричні, гідравлічні та пневматичні. До групи електричних підсилювачів залежно від типу підсилювального (керуючого) елемента відносяться лампові, напівпровідникові, магнітні, електромагнітні та електромеханічні підсилювачі. Гідравлічні і пневматичні підсилювачі мають загальні принципи дії та залежно від типу підсилювального (розподільного) елемента підрозділяються на дросельні й струминні.
Підсилювальні пристрої використовуються в системах автоматичного регулювання як самостійні елементи, так і в складі регуляторів і виконавчих механізмів.
До підсилювачів, які використовують у системах автоматичного керування і регулювання, пред'являють наступні основні вимоги:
o підсилювач повинен мати необхідний коефіцієнт передачі (посилення) по потужності й іншим параметрам;
o постійна часу підсилювача, що характеризує його швидкодія, повинна бути малої в порівнянні із цими ж характеристиками інших елементів системи;
o статична характеристика підсилювача в робочій зоні змін вихідної і вхідної величин повинна бути лінійною;
o поріг чутливості підсилювача повинен бути мінімальним і не перевищувати припустимого значення.
Поряд із цими вимогами істотне значення мають технологічні, експлуатаційні й економічні показники. Основний показник підсилювача — його коефіцієнт підсилення по потужності
 (2.49)
(2.49)
де ΔPвх, ΔPвых — збільшення потужності на вході і на виході підсилювача.
Поряд із загальною функцією посилення по потужності підсилювальний пристрій може виконувати функцію посилення лише одного з параметрів, що входять у вираження потужності, при значенні другого параметра, рівному нулю або близькому до нього.
Вхідні величини підсилювача залежно від його типу — це струм і напруга, швидкість переміщення керуючого елемента і момент опору або витрата і тиск робочого тіла (у гідравлічних і пневматичних підсилювачах). Вихідні величини — це струм і напруга, витрата і тиск робочого тіла (рідини, газу) на вході виконавчого механізму.
Електричні підсилювачі. Для різного виду електричних підсилювачів основними показниками є коефіцієнт підсилення по напрузі
 (2.50)
(2.50)
і по струму
 (2.51)
(2.51)
де ΔU, ΔI — відповідно збільшення напруги й струму на виході і на вході підсилювача.
По виду статичної характеристики, що зв'язує вихідну та вхідну величини підсилювачів, останні підрозділяються на лінійні і суттєво нелінійні пристрої.
Суттєво нелінійні характеристики мають підсилювачі релейного типу. Такі характеристики можуть мати також зону нечутливості, насичення, гістерезис.
Електронні підсилювачі. У якості керуючих пристроїв в електронних підсилювачах застосовуються електронні лампи, іонні та напівпровідникові прилади. Електронні підсилювачі мають високу чутливість (великий коефіцієнт підсилення) і мають здатність підсилювати сигнали досить малої потужності.
У зв'язку з розвитком напівпровідникової технології в пристроях автоматики застосовуються переважно напівпровідникові підсилювачі. Останні забезпечують високий ККД при низьких напругах живлення і більших струмах, мають малі габаритні розміри й великий термін служби.
У системах автоматичного керування застосовуються транзисторні та тиристорні підсилювачі. Коефіцієнт підсилення транзисторних і тиристорних підсилювачів на один каскад має наступні значення:
посилення по напрузі ku≤0;
посилення по струму ki≤100;
посилення по потужності kp=102…104.
Максимальна вихідна потужність досягає 10 кВт при ККД, рівному 96...98%.
Підсилювачі, включені послідовно, становлять багатокаскаднийі підсилювальний пристрій.
Застосовуються підсилювачі постійного і змінного струму.
Підсилювачі змінного струму з вихідною потужністю до десятків ватів знаходять широке застосування в пристроях електроавтоматики в основному для керування двофазними індукційними електродвигунами. Потужність, споживана обмоткою управління двигуна, складається з активної та реактивної складових, причому тільки активна складова потужності робить корисну роботу. Для компенсації реактивної потужності двигуна паралельно або послідовно з керуючою обмоткою включають конденсатор.
У схемах каскадів транзистори включають за схемою із загальним емітером, що забезпечує максимальне посилення по потужності.
Фазочутливий підсилювач, схема якого показано на малюнку 2.14, а, застосовується в релейних регуляторах. Підсилювач харчується змінною напругою через трансформатор Т2. Навантаження Rн включена в ланцюг колектора транзистора V1 через діод V2. Струм через навантаження може протікати тільки протягом половини періоду в тому випадку, коли транзистор відкривається струмом у ланцюзі база — емітер, тобто коли вхідна змінна напруга збігається по фазі з напругою живлення. Основною умовою роботи фазочутливого каскаду є рівність частоти змінного струму вхідного сигналу й напруги живлення. Для цього обоє напруги повинні бути отримані від одного джерела. Графіки напруг у ланцюзі бази транзистора й у навантаженні показано на малюнку 2.14, б.
Значення вихідної напруги підсилювача залежить від амплітуди й фази струму вхідного сигналу: вихідна напруга пропорційна в певному діапазоні зміни вхідного сигналу, за межами цього діапазону вихідна напруга залишається незмінним. Середнє випрямлене значення напруги на навантаженні від напруги вхідного сигналу визначається вираженням
 , (2.52)
, (2.52)
де Um — амплітуда напруги живлення; φ — початкова фаза сигналу.
При φ=0 напруга на навантаженні має найбільше значення. Зі збільшенням кута зрушення фаз порівн напруга на навантаженні зменшується, і при φ=±180° воно дорівнює нулю.
Якщо транзистор фазочутливого підсилювача працює в ключовому режимі, то вхідний сигнал буде перемикати транзистор при деякій початковій амплітуді сигналу й вихідна напруга не буде практично залежати від амплітуди керуючого сигналу.
Підсилювачі постійного струму застосовуються в системах автоматичного керування для посилення напруг і струмів малого рівня, одержуваних від термоелектричних датчиків.
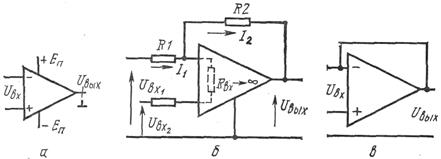
Рис. 2.15. Операційні підсилювачі:
а — позначення операційного підсилювача; б — ідеальний операційний підсилювач; в — схема повторювача напруги на операційному підсилювачі.
Виконані на основі інтегральної технології підсилювачі постійного струму називають операційними підсилювачами. Вони містять кілька каскадів посилення і коригувальні ланцюги для поліпшення їх статичних і динамічних характеристик. Операційні підсилювачі мають високу чутливість, низький поріг чутливості, малий дрейф напруги від температури, висока швидкодія. Перший каскад операційного підсилювача виконаний за диференціальною схемою. Умовна позначка операційного підсилювача показано на малюнку 2.15, а.
Операційний підсилювач має коефіцієнт підсилення порядку 1000 ... 100000 і більш, а вхідний опір — до 1000 МОм і більш. Вихідний опір підсилювача малий і рівно 1000 Ом і менш. Підсилювач має диференціальний вхід і підсилює різницю напруг, прикладених до входів. Якщо збільшення вхідної напруги відносно загальної крапки викликає зменшення вихідної напруги, то цей вхід називають інвертующий і на схемі позначають знак мінус, а другий вхід — неінвертующим і позначають знаком плюс.
Основне рівняння ідеального операційного підсилювача одержують зі схеми включення, показаної на малюнку 2.15, б.
Для ідеального підсилювача ухвалюють наступні допущення: коефіцієнт підсилення k→∞, вхідний опір Rвх→∞, вихідний опір Rвых→∞.
На підставі законів Кирхгофа для ідеального операційного підсилювача (мал. 2.15, б) одержимо наступну систему рівнянь:

З обліком того що Iвх=0 і евх=0, одержимо
 (2.53)
(2.53)
Якщо Uвх2=0, то коефіцієнт передачі такого підсилювача визначається з рівняння (2.53)
 (2.54)
(2.54)
Такий підсилювач називається, що інвертують масштабним. У неідеальному операційному підсилювачі на значення вихідної напруги впливають напруга зсуву, при якім вихідна напруга дорівнює нулю, значення вхідного струму Iвх і різниця вхідних струмів ΔIвх при вхідній напрузі, рівному нулю, які обумовлюють погрішність коефіцієнта підсилення від зміни температури й інших зовнішніх факторів. Цю погрішність визначають по формулі
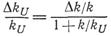 (2.55)
(2.55)
Коефіцієнт передач усилителя, що неинвертирующего, определяется из уравнения (2.53) при Uвх1
 (2.56)
(2.56)
Якщо потрібно погодити високий внутрішній опір джерела сигналу з низьким опором навантаження, то використовують повторювач напруги, схема якого показано на малюнку 2.15, в.
Коефіцієнт передачі повторювача ku = 1.
Вхідний опір
 (2.57)
(2.57)
Вихідний опір
 (2.58)
(2.58)
На основі прецизійних операційних підсилювачів виконують електронні, що нормують перетворювачі для одержання уніфікованих електричних сигналів постійного струму ГСП: 0...5 мА, 0...20 мА, 0...10 В.
У тиристорних підсилювальних пристроях у якості керуючого елемента використовують тиристор. Тиристор може перебувати тільки у двох стійких станах: включеному й виключеному. Завдяки інтенсивності розвитку лавинного процесу включення тиристора відбувається практично миттєво (tвкл=1...5 мкс), і після цього він залишається у включеному стані навіть при знятті керуючого сигналу. Відключення тиристора здійснюється зняттям анодної напруги. Час відключення тиристора становить tот=5...50 мкс. Оскільки при живленні підсилювача змінним струмом струм протягом кожного півперіоду переходить через нуль, то створюються природні умови для відключення тиристора.
Магнітні підсилювачі. Магнітним підсилювачем (МУ) називається електромагнітний апарат, призначений для керування щодо великою потужністю змінного струму за допомогою малої потужності постійного струму. Керуючий елемент магнітного підсилювача -котушка індуктивності з феромагнітним сердечником.
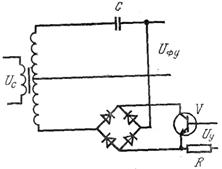
Рис. 2.17. Схема мостового фазосдвигаючого пристрою.
Принцип дії магнітного підсилювача заснований на залежності магнітної проникності феромагнітних матеріалів котушки із сердечником при живленні змінним струмом від підмагнічувающої дії постійного поля. Схема магнітного підсилювача показано на малюнку 2.18, а.
Магнітний підсилювач складається із двох робочих котушок ω1 і ω2, намотаних на двох сердечниках I і II з феромагнітного матеріалу, і котушки керування ωу, намотаної на стрижнях обох сердечників магнітопроводу.
Робочі котушки з'єднані таким чином, щоб їх змінні магнітні потоки Ф у внутрішніх стрижнях магнітопроводу були спрямовані назустріч, внаслідок чого електрорушійні сили, индуктивними змінними магнітними потоками Ф у обмотці керування ωу, будуть взаємно компенсуватися.
Вхідна величина МП — напруга Uу або струм Iу в обмотці керування. Вихідна величина МП — змінний струм в опорі навантаження RH. Значення цього струму
 (2.60)
(2.60)
де  — сума активного опору навантаження і робочих котушок МП;
— сума активного опору навантаження і робочих котушок МП;  — сума реактивних опорів робочих котушок ω1 і ω2 МП.
— сума реактивних опорів робочих котушок ω1 і ω2 МП.
Індуктивність робочих обмоток МП

де ω - число витків котушки; S — площа перетину сердечника; l — довжина середньої лінії сердечника; μ — коефіцієнт магнітної проникності сердечника.
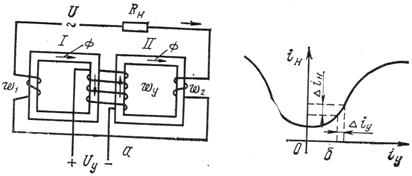
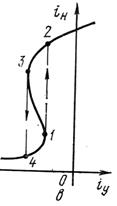
Рис. 2.18. Магнітний підсилювач: а — схема; б — статична характеристика; в — статична характеристика в релейному режимі.
постійний струм, Що протікає по обмотці керування, міняє насичення магнітопроводу, змінюючи при цьому його динамічну магнітну проникність. При збільшенні струму керування зменшується реактивне сопротивение робочих котушок МП й збільшується струм, що протікає через опір навантаження. Статична характеристика МП, що представляє собою залежність струму навантаження від струму керування, показано на малюнку 2.18, б. Коефіцієнт підсилення по струму
 (2.61)
(2.61)
Коефіцієнт підсилення МП по потужності
 (2.62)
(2.62)
Для одержання більшого коефіцієнта підсилення слід забезпечити роботу МП на найбільш крутій ділянці робочої характеристики. Це досягається зсувом характеристики додатковим підмагнічуванням магнітопроводу за допомогою обмотки зсуву. Обмотка зсуву намотана на тому ж сердечнику, що й обмотка керування, і харчується від джерела постійної напруги.
Коефіцієнт підсилення МП залежить від матеріалу магнітопровода і від частоти змінного струму. Для МП з магнітопроводом з електротехнічної сталі коефіцієнт підсилення становить 50...200 при частоті змінного струму 50 Гц і 100...800 при частоті 500 Гц. Для МП з магнітопроводом з пермаллоя коефіцієнт підсилення рівний 100...1000 при частоті змінного струму 50 Гц і 200...2000 при частоті 500 Гц.
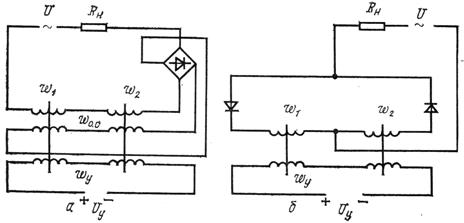
Рис. 2.19. Схеми МП із зовнішньої (а) і внутрішньої (б) зворотним зв'язком.
Значно більший коефіцієнт підсилення може бути досягнуться в МП з позитивним зворотним зв'язком. Коефіцієнт підсилення по потужності в МП з позитивним зв'язком, виконаних на сердечниках з електротехнічної сталі, при частоті 50 Гц досягають 1000, а на сердечнику з пермаллоя — 3000...10 000.
Якщо зворотний зв'язок виходить шляхом використання в МП окремої обмотки, то такий зворотний зв'язок називається зовнішньої. Вона характеризується коефіцієнтом зворотного зв'язку, який визначають вираженням
 (2.63)
(2.63)
де ωос — число витків котушки зворотному зв'язка; ωр — число витків робочої обмотки.
Якщо зворотний зв'язок утворюється за рахунок проходження постійної складовій робочого струму, то вона називається внутрішньої. Схеми зворотного зв'язку показано на малюнку 2.19. Магнітний підсилювач, схема якого показана на малюнку, називається однотактним МП.
Коефіцієнт підсилення МП зі зворотним зв'язком
 (2.64)
(2.64)
де kі — коефіцієнт підсилення МП без зворотного зв'язку.
Знак мінус ставиться до позитивного зворотного зв'язка. Коли kос≥1, те МУ переходить у релейний режим і його робоча характеристика має вигляд, показаний на малюнку 2.18, в.
При збільшенні струму керування робочий струм у навантаженні змінюється до крапки 1 на характеристиці і стрибком збільшується до значення в струмі 2. При подальшім збільшенні струму керування робочий струм збільшується незначно. При зменшенні струму керування робочий струм плавно змінюється до крапки 3, а потім стрибком змінюється до значення його в крапці 4.
До недоліків звичайних МП слід віднести їхню малу швидкодію, яка визначається постійної часу ланцюга керування
 (2.65)
(2.65)
де f — частота змінного струму; R, ωp — активний опір і число витків робочих обмоток; Rу, ωу — опір і число витків обмотки керування.
Передатна функція МУ має вигляд
 (2.66)
(2.66)
Гідравлічні й пневматичні підсилювачі. У конструктивнім відношенні гідравлічні й пневматичні підсилювачі мають багато загального й відрізняються тільки енергоносієм (робітником тілом), у якості якого в гідравлічних підсилювачах використовується рідина під високим тиском, а в пневматичних — газ.
Гідравлічні й пневматичні підсилювачі конструктивно виконуються разом з виконавчими пристроями. Ці підсилювачі мають рядом істотних переваг: більшим коефіцієнтом підсилення по потужності, високою швидкодією, малими габаритами, малою металоємністю на 1 кВт вихідній потужності. Недолік їх застосування — необхідність використовувати спеціалізовані джерела живлення (гідравлічні насоси, компресори).
Гідравлічні й пневматичні підсилювачі призначені для посилення потужності сигналів, що подавайтеся на їхній вхід, і перетворення й посилення по потужності потоку робочої рідини або газу. Посилення потужності здійснюється за рахунок використання енергії зовнішніх джерел. Під впливом зовнішніх вхідних сигналів постійної потужності ці підсилювачі змінюють потужність потоку робочої рідини або газу, що надходить із виходу підсилювача на вхід гідро- або пневмодвигуна, від нуля до деякої максимальної величини.
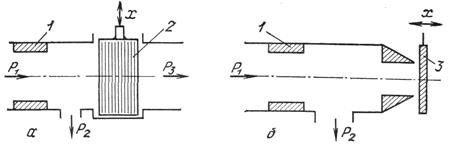
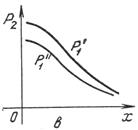
Рис. 2.20. Дросельні підсилювачі із золотником (а), із соплом-заслінкою (б) і їх статичні характеристики (в).
Зміна за значенням і по напрямкові лінійної або кутової швидкості переміщення вихідного вала двигуна використовується для зміни положення керуючого органа об'єкта.
За принципом дії підсилювачі діляться на два класи: дросельні й струминні. Дросельні підсилювачі діляться на золотникові й із соплом-заслінкою. Схематичне зображення дросельних підсилювачів і їх статичні характеристики показано на малюнку 2.20.
Розглянемо роботу дросельних підсилювачів. Робоча рідина або повітря під постійним тиском р1 подається через дросель 1 і через дросель, утворений золотником 2 або заслінкою 3. Площа перетину другого дроселя змінюють переміщенням золотника 2 або заслінки 3.
Тиск р2, яке встановлюється між дроселями, залежить від величини х і використовується для впливу на поршень або мембрану виконавчого механізму. Статична характеристика дросельного підсилювача показано на малюнку 2.20, в. Для підвищення вихідної потужності застосовують двокаскадне включення дросельних підсилювачів.
Спрощена принципова схема гідравлічного підсилювача зі струминною трубкою показано на малюнку 2.21, а.
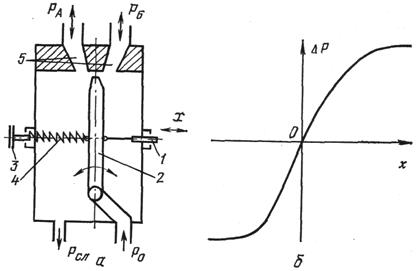
Рис. 2.21. Схема гідравлічного підсилювача зі струминною трубкою (а) і його статична характеристика (б): 1 — штовхач; 2 — струминна трубка; 3 — гвинт; 4 — пружина; 5 — прийомні сопла.
У корпусі підсилювача перебуває трубка 2, один кінець якої виконаний у вигляді конічного насадка. Інший кінець трубки закріплений на осі, перпендикулярній площині малюнка. Від джерела живлення через вісь у струминну трубку подається робоча рідина під постійним тиском р0. На струминну трубку опирається з однієї сторони штовхач 1, з'єднаний з датчиком переміщення, а з іншого сторони — пружина 4, початковий натяг якої може бути змінене гвинтом 3. В автоматичних регуляторах пружина 4 може виконувати функції задатчика. Струминна трубка може повертатися на невеликі кути. Напроти конічного насадка струминної трубки розташовані паралельно сопла 5, з'єднані трубопроводами з гідравлічним двигуном. Аналогічно виконані й пневматичні струминні підсилювачі.
Дата добавления: 2017-01-29; просмотров: 4393;