Математическая модель динамической системы. Определение адаптивной системы
Будем рассматривать конечномерную нелинейную и нестационарную систему обыкновенных дифференциальных уравнений в непрерывном времени (говорят, динамическую систему, динамический объект или, короче, объект) вида:
 , (1.1.1)
, (1.1.1)
 -порядок системы,
-порядок системы,  .
.
Систему (1.1.1) для краткости будем записывать в виде векторного уравнения:
 (1.1.2)
(1.1.2)
где  - вектор состояния,
- вектор состояния,  - вектор управления, t - время (вещественная переменная),
- вектор управления, t - время (вещественная переменная),

 - множество допустимых управлений - вектор-функции u,
- множество допустимых управлений - вектор-функции u,  - правые части дифференциальных уравнений (1.1.1) или (1.1.2),
- правые части дифференциальных уравнений (1.1.1) или (1.1.2),  , означает неназванные аргументы.
, означает неназванные аргументы.
Область[1] определения вектор-функции fправых частей дифференциальных уравнений (1.1.1) или (1.1.2) имеет следующий вид:
 (1.1.3)
(1.1.3)
где знак «×» означает декартово произведение множеств,
 - множество моментов времени (вещественная полуось),
- множество моментов времени (вещественная полуось),  -
-  -мерное линейное (афинное) пространство над полем
-мерное линейное (афинное) пространство над полем  .
.
В можно построить какую либо норму («длину» вектора), например, векторную евклидову норму вида  тогда пара { , ||·||},называется линейным нормированным пространством (над полем R).
тогда пара { , ||·||},называется линейным нормированным пространством (над полем R).
Вектор-функция  в области
в области  обладает следующими свойствами:
обладает следующими свойствами: 
(а) f - непрерывна по всем аргументам  ;
;
(б) f - имеет непрерывные частные производные вида 

 , (1.1.4) ограниченные равномерно по
, (1.1.4) ограниченные равномерно по  на любом компактном подмно-
на любом компактном подмно-
жестве из области 
Условия (1.1.4) обеспечивают однозначную разрешимость системы дифференциальных уравнений (1.1.1) или (1.1.2) для любой тройки  ,т.е для любой точки
,т.е для любой точки  и некоторого управления
и некоторого управления  существует единственное решение системы дифференциальных уравнений (1.1.2) вида
существует единственное решение системы дифференциальных уравнений (1.1.2) вида  , определённое на некотором промежутке
, определённое на некотором промежутке  ,
,  и удовлетворяющее тождеству:
и удовлетворяющее тождеству:
 (1.1.5)
(1.1.5)
Пара  называется начальными данными решения
называется начальными данными решения  , тождество (1.1.5) называется начальным условием решения , а само решение называется решением задачи Коши.
, тождество (1.1.5) называется начальным условием решения , а само решение называется решением задачи Коши.
Таким образом, условия (1.1.4) обеспечивает существование и единственность решения, проходящего через любую точку  с некоторым управлением u. А это означает, что для системы дифференциальных уравнений (1.1.2) имеет место следующая эквивалентность:
с некоторым управлением u. А это означает, что для системы дифференциальных уравнений (1.1.2) имеет место следующая эквивалентность:
условия (1.1.4) для  -область единственности.
-область единственности.
Определение. Система дифференциальных уравнений (1.1.1) или (1.1.2) определяет так называемую конечномерную гладкую динамическую систему с непрерывным временем. Это наиболее общая (и общеупотребительная) математическая модель нелинейной и нестационарной динамической системы, которую рассматривает современная математическая теория систем управления. ■
Определение.Динамическая система (1.1.2) называется системой с обратной связью, если управление u есть функция состояния  и времени:
и времени:

Тогда
 (1.1.6)
(1.1.6)
называется системой с обратной связью (по состоянию), или замкнутой системой (по состоянию). ■
Замечание. Отметим, что в системе с обратной связью по состоянию (1.1.6) из правых частей исключено управление и они зависят только от аргументов  , поэтому при дальнейшем изложении методов теории устойчивости систем управления будем описывать систему векторным уравнением
, поэтому при дальнейшем изложении методов теории устойчивости систем управления будем описывать систему векторным уравнением  , опуская черточку над fв уравнении (1.1.6) и аргумент uв уравнении (1.1.2).■
, опуская черточку над fв уравнении (1.1.6) и аргумент uв уравнении (1.1.2).■
Определение. Решением системы
(1.1.7)
называется функция  , обладающая следующими свойствами:
, обладающая следующими свойствами:
(а) - определена, непрерывна и непрерывно дифференцируема по на некотором промежутке  , включающем точку t0;
, включающем точку t0;
(б) точки  - области определения системы (1.1.7) вида (опускаем аргумент u):
- области определения системы (1.1.7) вида (опускаем аргумент u):
 ; (1.1.8)
; (1.1.8)
(в) удовлетворяет уравнению (1.1.7):
 ■
■
Определение. Решение  системы (1.1.7) называется бесконечно продолжимым (продолжаемым) вправо, если оно определено на всем полубесконечном интервале времени . ■
системы (1.1.7) называется бесконечно продолжимым (продолжаемым) вправо, если оно определено на всем полубесконечном интервале времени . ■
В теории дифференциальных уравнений имеет место следующая теорема.
Теорема (о свойствах продолжимости решений дифференциальных систем)
Пусть дана система (1.1.7)

и пусть область  существования f вида (1.1.8) есть область единственности, то есть правые части f удовлетворяют свойствам:
существования f вида (1.1.8) есть область единственности, то есть правые части f удовлетворяют свойствам:
 а) f - непрерывно по ;
а) f - непрерывно по ;
б) f - непрерывно дифференцируема по x и  - (1.1.9)
- (1.1.9)
ограничены равномерно по на любом компактном
подмножестве из  .
.
Тогда все решения системы (1.1.7) обладают следующими взаимоисключаемыми свойствами:
(а) либо все решения  бесконечно продолжимы вправо;
бесконечно продолжимы вправо;
(б) либо все решения  - существуют на ограниченном интервале
- существуют на ограниченном интервале 
 ,
,  и имеет место следующие предельное соотношение:
и имеет место следующие предельное соотношение:  , то есть при бесконечном приближении к правому концу
, то есть при бесконечном приближении к правому концу  интервала слева решение уходит на
интервала слева решение уходит на  (по норме) ■.
(по норме) ■.
В дальнейшем будем обозначать решение системы (1.1.7) той же буквой  :
: 
Определение адаптивной системы. Формулировка задачи адаптивного управления (на содержательном уровне).В адаптивном управлении используют следующую математическую модель динамической системы (объекта):
 (1.1.10)
(1.1.10)
Пусть модель (1.1.10) задана в области (1.1.3) и f(·) удовлетворяет условиям (1.1.4).
Эта модель является иной записью уравнения (1.1.2)  , когда в описании системы подчеркивают то, что она не может быть полностью определена, то есть в правых частях ее дифференциальных уравнений имеются неизвестные параметры и (или) функции. Эти неизвестные свойства правых частей «вносят» в некоторую неизвестную вектор-функцию вида
, когда в описании системы подчеркивают то, что она не может быть полностью определена, то есть в правых частях ее дифференциальных уравнений имеются неизвестные параметры и (или) функции. Эти неизвестные свойства правых частей «вносят» в некоторую неизвестную вектор-функцию вида
 ,
,  , (1.1.11)
, (1.1.11)
где  - любое положительное целое число.
- любое положительное целое число.
Определение. Динамическая система (объект) (1.1.10) называется системой (объектом) с параметрической неопределенностью если  - постоянный (числовой) вектор или вектор-функция времени
- постоянный (числовой) вектор или вектор-функция времени  .
.
Динамическая система (объект) (1.1.10) называется системой (объектом) с функционально-параметрической неопределённостью, если вектор – функция  зависит, вдобавок, от состояния■.
зависит, вдобавок, от состояния■.
Итак, - N-мерная вектор-функция неизвестных параметров и функций системы (1.1.10), причем N не ограничено размерностью n системы.
Вектор функция  принадлежит множеству неизвестных функций
принадлежит множеству неизвестных функций  , называемому множеством неопределенности, или классом адаптивности системы (объекта) (1.1.10).
, называемому множеством неопределенности, или классом адаптивности системы (объекта) (1.1.10).
Таким образом, имеем дело с множеством объектов или систем вида (1.1.10), характеризуемых классом адаптивности (неопределенности) . Говорят, что множество определяет класс адаптивности (неопределенности) системы (1.1.10).
Замечание. Очевидно, что все аргументы  должны принадлежать области определения системы (1.1.10). Полагаем так же, что N-вектор
должны принадлежать области определения системы (1.1.10). Полагаем так же, что N-вектор  не зависит от функции
не зависит от функции  ■
■
Рассматривают следующие этапы построения адаптивного управления для системы (1.1.10):
1. Задают класс адаптивности 
2. Формулируют цель адаптивного управления. Она, как правило, определяется некоторым целевым функционалом
 , (1.1.12)
, (1.1.12)
где Q - скалярная вещественная функция векторных аргументов  и времени
и времени  и целевым неравенством вида
и целевым неравенством вида
 , (1.1.13)
, (1.1.13)
называемым целевым условием для целевого функционала (1.1.12).
3. Определяют закон адаптивного управления
 (1.1.14)
(1.1.14)
где q- некоторая векторная функция настраиваемых параметров закона адаптивного управления  . Отметим, что адаптивный закон (1.1.14) не должен зависеть от неизвестной вектор-функции
. Отметим, что адаптивный закон (1.1.14) не должен зависеть от неизвестной вектор-функции  Такое управление зачастую называется законом основного контура и подчеркивается, что оно строится по некоторым правилам, формулируемым вне задачи адаптивного управления.
Такое управление зачастую называется законом основного контура и подчеркивается, что оно строится по некоторым правилам, формулируемым вне задачи адаптивного управления.
4. Определяют правила настройки вектор-функции q, которые выражаются дифференциальным или алгебраическим уравнениями вида:
 , или
, или  (1.1.15)
(1.1.15)
Замечание. Вектор-функция q можетиметь размерность, вообще говоря, отличную от размерности N неизвестной вектор-функции x(t, x).■
Таким образом, приходят к системе (дифференциальных уравнений) вида:
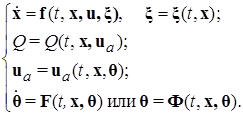 (1.1.16)
(1.1.16)
Определение. Динамическая система (1.1.16) называется адаптивной системой, а подлежащие определению уравнения  или
или  называются алгоритмами параметрической настройки закона адаптивного управления (алгоритмами параметрической адаптации).■
называются алгоритмами параметрической настройки закона адаптивного управления (алгоритмами параметрической адаптации).■
Таким образом, задача адаптивного управления неопределенным объектом (1.1.10) может быть сформулирована следующим образом: найти (построить) закон адаптивного управления (закон основного контура) (1.1.14) не содержащий неизвестную вектор-функцию (1.1.11), и найти алгоритмы настройки (1.1.15) такие, чтобы обеспечивались ограниченность (по норме) всех решений адаптивной системы (1.1.16) и выполнение предельного целевого неравенства (1.1.13) во всем классе адаптивности (неопределенности) объекта (1.1.10), т.е. для всех значений вектор-функции (1.1.11).■
Говорят также, что адаптивное управление (1.1.14) и алгоритмы настройки его параметров (1.1.15) обеспечивают асимптотически (в силу целевого неравенства (1.1.13)) нечувствительность (робастность) системы (1.1.16) к параметрическим рассогласованиям (возмущениям) вида (1.1.11).
Дата добавления: 2016-11-02; просмотров: 1066;