Процессы в нелинейных системах
В системах управления, наряду с линейными ПИД законами регулирования, применяются нелинейные законы регулирования, среди которых наиболее распространены релейные законы. Релейные законы имеют две разновидности: двухпозиционный закон регулирования и трехпозиционный. При этом система становится принципиально нелинейной. Нелинейными свойствами могут также обладать объекты управления или технологические процессы.
Применение релейных законов регулирования во многих случаях позволяет решить задачу автоматического регулирования простым способом при высоком быстродействии. Релейные законы дают возможность добиться таких результатов, которые принципиально не могут быть достигнуты при помощи линейных регуляторов. Динамический процесс при релейном регуляторе может быть сходящимся к положению равновесия или расходящимся в зависимости не только от значений параметров системы, но и от величины начальных условий. Поэтому исследование динамики нелинейных систем автоматического регулирования более удобно производить с помощью метода фазовой плоскости. Достоинство данного метода заключается в возможности получения достаточно полного решения пря высокой точности. Однако исследовать нелинейные система с помощью построения фазового портрета удобно лишь для систем второго порядка, когда фазовые траектории размещаются на плоскости. Для более высоких порядков фазовые траектории могут быть построены в пространстве, в связи с чем возрастают трудности анализа.
Фазовый портрет систем с релейным законом изображается на плоскости, имеющей две координатные оси. На горизонтальной оси откладывается регулируемый параметр У, а на вертикальной оси – его производная dy/dt, т.е. скорость изменения регулируемого параметра. Характер фазовых траекторий определяется видом исходного уравнения системы, начальное положение точки на фазовой плоскости определяется начальными условиями. Фазовая плоскость с траекториями в целом соответствует общему решению системы и характеризует совокупность всех возможных движений. Построив фазовые траектории, можно проследить, как движется по ним изображающая точка относительно точки покоя. Если изображающая точка с течением времени неограниченно удаляется от точки покоя, соответствующее равновесное состояние неустойчиво. Наоборот, если изображающая точка, независимо от ее начального положения, двигаясь по фазовой траектории, приходит к точке покоя, состояние равновесия устойчиво. Точкой покоя считается изолированная особая точка с координатами у=0, dY/dt =0.
Однако применение релейных регуляторов при определенных условиях приводит к возникновению автоколебаний. Автоколебания отличны от свободных колебаний консервативных систем и возникают только в системах существенно неконсервативных, к которым и относятся замкнутые системы цифрового управления. Автоколебания поддерживаются за счет равенства потерь энергии за колебательный цикл притоку энергии от колебательного источника. Таким источником энергии обычно служит объект управления. При этом система, совершающая колебательное движение, сама управляет притоком энергии от источника. Форма и частота автоколебаний определяется параметрами системы. Характерной особенностью автоколебаний является то, что они обычно не исчезают при достаточно малых изменениях начальных условий и параметров системы. Если автоколебания существуют, то они существуют для целой области начальных отклонений. Разработан и применяется ряд методов определения автоколебаний и устойчивости нелинейных систем. Наиболее простым из них является метод, разработанный Гольдфарбом Л. С. Этот метод является графическим, обладает хорошей наглядностью и сравнительной простотой. Этот метод может быть использован для приближенного анализа нелинейных систем управления. В этом случае структура системы имеет вид, представленный на рис. 3.3.
X D U y
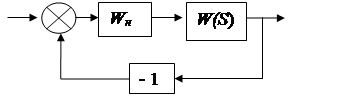
Рис. 3.3. Структура нелинейной системы
В структуре представлен нелинейный элемент с передаточной функцией WH и линейный элемент с непрерывной передаточной функцией W(S).
Общее аналитическое представление нелинейной системы может быть представлено следующим способом. Уравнение нелинейной части представляется в виде
U(t) = F[D(t)] . (3.1)
Относительно изображений уравнение (3.1) примет вид
U(p) = L{ F[D(t)]} =  . (3.2)
. (3.2)
На выходе линейной части сигнал y(p) определяется уравнением
y(p) = W(p)u(p), (3.3)
где W(p) – передаточная функция линейной части.
С учетом уравнения (3.2) уравнение (3.3) примет вид
y(p) = W(p)u(p) =W(p) L{ F[D(t)]} =W(p)  , (3.4)
, (3.4)
где D(t) = x(t) – y(t) или в пространстве изображений D(p) = x(p) – y(p).
Уравнение (3.4) является нелинейным, поскольку в него входит изображение D(t) и нелинейная функция F[D(t)]. При переводе уравнения (3.4) к оригиналу, согласно теореме свертывания преобразования Лапласа, получим
y(t) =  . (3.5)
. (3.5)
Уравнение (3.5) является интегральным нелинейным и не имеет общих методов решения. Решения могут быть получены численными методами или с помощью программных комплексов с применением персональных компьютеров.
Уравнение свободных колебаний (характеристическое уравнение) замкнутой системы имеет следующий вид
 , (3.6)
, (3.6)
где W(jω) – частотная передаточная функция линейной части; WH(а) – эквивалентная частотная передаточная функция нелинейной части. Представим выражение (3.6) в виде уравнения Гольдфарба
W(jω) = -GH(a) , (3.7)
где GH(a) = 1/ WH(a).
Уравнение (3.7) решается графически. Для этого на комплексной плоскости строится АФЧХ линейной части при изменении ω от 0 до ∞ и обратная АФЧХ нелинейной части при изменении а от 0 до ∞ , где а – амплитуда гармонического воздействия. Точка пересечения кривых АФЧХ определяет амплитуду и частоту возможных автоколебаний. Если точки пересечения нет, то автоколебании невозможны. Критерий устойчивости Гольдфарба формулируется следующим образом. Если линейная часть разомкнутой системы устойчива, то точка пересечения характеристик W(jω ) и -1/WН(a) соответствует устойчивым автоколебаниям, когда в этой точке характеристика -1/WН(a) выходит из контура W(jω ). Если же в точке пересечения характеристика -1/WН(a) входит в контур W(jω ), то такая точка соответствует неустойчивым автоколебаниям. Сформулированный критерий Гольдфарба является необходимым, но недостаточным. Однако в большинстве практических задач указанный критерий оказывается достаточным, причем тем вероятнее, чем больше фильтрующие свойства линейной части системы. Эквивалентная частотная передаточная функция нелинейного элемента может быть представлена в следующем виде
 (3.8),
(3.8),
где q(a) – модуль эквивалентной частотной передаточной функции (эквивалентная амплитудная частотная характеристика); М(а) – аргумент эквивалентной частотной передаточной функция (эквивалентная фазовая частотная характеристика). Вид q(a) и М(а) зависит от типа нелинейности, в частности для двухпозиционного релейного регулятора
 ,
,
M(a)= 0.
Для трехпозиционного релейного регулятора
 ,
,
M(a)= 0.
На рис.3.4. представлены АФЧХ линейной части и нелинейной, иллюстрирующие применение метода Гольдфарба. На рисунке точка М соответствует неустойчивым колебаниям, а точка N соответствует устойчивым автоколебаниям.
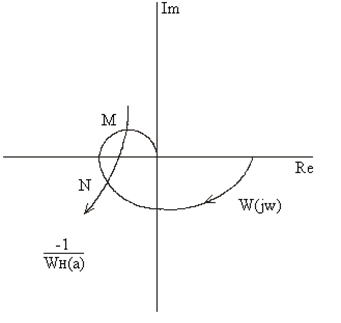
Рис.3.4. АФЧХ линейной и нелинейной части.
Таким образом, рассмотренный подход позволяет производить анализ процессов и выявить особенности поведения нелинейных систем.
Дата добавления: 2016-09-20; просмотров: 1419;