Оценки качества регулирования
Кроме устойчивости САР анализируются с точки зрения качества регулирования. В общем случае качество регулирования представляет собой совокупность точности в установившемся режиме и качества переходных процессов.
Оценки качества могут быть прямыми и косвенными. В свою очередь прямые и косвенные могут быть статическими и динамическими. Динамические оценки характеризуют переходной процесс, а статические - установившийся режим.
Прямые оценки определяются непосредственно по переходной характеристике по каналу управления или возмущения (рис. 4.1.)

Рис. 4.1. Переходная характеристика.
Если переходная характеристика представляет собой затухающие колебания, то система считается устойчивой. При этом допускается не более 2-3 колебаний. К основным прямым оценкам относятся следующие: s-регулирование, tp- время регулирования, e - декремент затухания, w - частота колебаний, n - число колебаний, которое имеет переходная характеристика за время регулирования tp, tH - время нарастания переходного процесса, tmax - время достижения первого максимума.
Перерегулирование есть разность между максимальным значением hmax1 переходной характеристики и её установившимся значением, выраженная в процентах

.
В большинстве случаев требуется, чтобы перерегулирование не превышало 10 - 30%.
Степень затухания переходного процесса оценивается декрементом затухания
 .
.
Время регулирования оценивает длительность переходного процесса. Так как теоретически длительность переходного процесса идеальных систем равно ¥, за время регулирования принимается тот интервал времени, по истечении которого отклонение переходной характеристики от установившегося значения не превышает некоторой заданной величины q. Значение q выбирают обычно равным 5%.
При заданных значениях s и tp переходная характеристика не должна выходить из определенной области, которая называется областью допустимых отклонений.
Применяются также динамические оценки систем при гармонических воздействиях, которые могут быть получены на основе частотных характеристик (АФЧХ, АЧХ, ФЧХ, ЛАЧХ и ЛФЧХ): показатель колебательности H, резонансная (собственная) частота wp, полоса пропускания wп, частота среза wс, запас устойчивости по амплитуде и по фазе.
Показатель колебательности Н – это отношение максимального значения модуля АФЧХ замкнутой системы к его значению при w=0. Показатель колебательности характеризует склонность системы к колебаниям. Считается допустимым , если 1< Н < 1.5.
Частота wp, , при которой АФЧХ замкнутой системы имеет максимальное значение, называется резонансной частотой, на этой частоте гармонические колебания проходят через систему с максимальным усилением.
Понятие полосы пропускания wп, частоты среза wс, запаса устойчивости по амплитуде и по фазе наиболее просто может быть дано на основе логарифмических частотных характеристик замкнутой устойчивой системы (рис. 4.2).
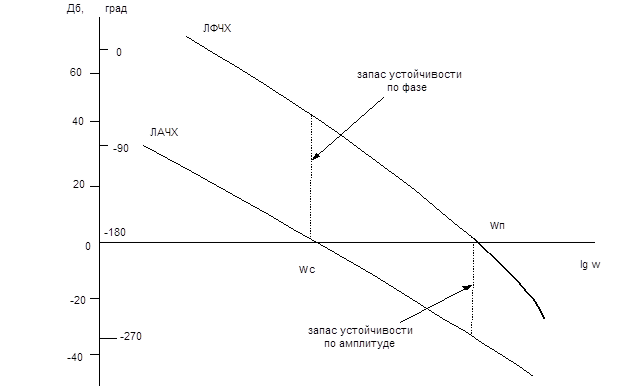
Рис.4.2. Логарифмические частотные характеристики замкнутой устойчивой системы
Частота среза wс косвенно характеризует длительность переходного процесса. При этом время регулирования tp обратно пропорционально частоте среза:
tp @ (1 ¸ 2)2p/ wс.
Если переходной процесс имеет одно – два колебания, то время достижения переходной характеристикой первого максимума tmax @ p/ wс.
Склонность системы к колебаниям характеризуется величинами ее запасов устойчивости по амплитуде и по фазе (рис. 4.2). В устойчивых системах запас устойчивости по амплитуде колеблется в пределах от 6 до 20 Дб, а запас устойчивости по фазе – от 30 до 60 градусов.
 В статическом режиме САР оценивается коэффициентом статизма (астатизма)
В статическом режиме САР оценивается коэффициентом статизма (астатизма)
,
где x - задание;
yуст - установившееся значение рабочего параметра.
 Рассмотренные выше оценки качества относятся к прямым. Вместе с тем существуют косвенные, среди которых наибольшее распространение получили интегральные оценки. Существует две разновидности интегральной оценки: линейная и квадратичная. Численно линейная интегральная оценка равна площади, ограниченной кривой ошибки иди разности Х - Y. Значение Y берется в пределах временного интервала от 0 до tp. Линейная интегральная оценка определяется следующим выражением
Рассмотренные выше оценки качества относятся к прямым. Вместе с тем существуют косвенные, среди которых наибольшее распространение получили интегральные оценки. Существует две разновидности интегральной оценки: линейная и квадратичная. Численно линейная интегральная оценка равна площади, ограниченной кривой ошибки иди разности Х - Y. Значение Y берется в пределах временного интервала от 0 до tp. Линейная интегральная оценка определяется следующим выражением
.
Эта оценка может быть применена только при монотонных переходных процессах при отсутствии колебаний.
 Квадратичная интегральная оценка применяется как при монотонных, так и при колебательных переходных процессах и определяется следующим соотношением
Квадратичная интегральная оценка применяется как при монотонных, так и при колебательных переходных процессах и определяется следующим соотношением
Недостаток квадратичной интегральной оценки заключается в том, что различные по характеру переходные процессы могут иметь одну и ту же величину оценки.
Другие методы определения прямых и косвенных оценок качества представлены в учебнике [2].
Коррекция САР
В тех случаях, когда устойчивость и необходимые качества не могут быть достигнуты путем изменения параметров системы (коэффициентов передачи, постоянных времени), то применяется коррекция. Коррекция представляет собой введение в систему дополнительных элементов, называемых корректирующими.
Корректирующие элементы (устройства) могут быть включены в структуру САР различными способами. Корректирующее устройство может быть включено в пряную цепь последовательно (рис 4.2.).

Рис 4.2. Последовательная коррекция.
Последовательное корректирующее устройства обычно применяют в тех случаях, когда сигнал управления представляет собой напряжение постоянного тока. Корректирующие устройства обычно выполняются в виде пассивных или активных электрических четырехполюсников постоянного тока. Если корректирующее устройство вводит производную от сигнала рассогласования D, то происходит увеличение запаса устойчивости и повышение качества переходного процесса. При введение интеграла и производной от сигнала рассогласования обеспечивается астатизм в сочетании с сохранением устойчивости и качества переходной характеристики.
Применяется также включение корректирующего устройства в виде обратной связи (рис. 4.З.)

Рис. 4.3. Коррекция в виде обратной связи
Обычно параметры корректирующего устройства выбирают таким образом, чтобы выполнялось соотношение

.
В этом случае свойства участка цепи, где включена коррекция и изменение её параметров не оказывают влияния на свойства всей системы. Это важное свойство является причиной широкого применения коррекции в виде обратной связи. Обратная связь здесь обычно является отрицательной.
Применяется третий способ коррекции - параллельный (рис 4.4)
Параллельная коррекция имеет меньшие возможности, чем две предыдущих разновидности. Вместе с тем, параллельное корректирующее устройство при меньшей сложности обеспечивает нужное преобразование сигнала рассогласования.

Рис. 4.4. Параллельная коррекция
Выбор параметров корректирующих устройств производится исходя из критериев устойчивости и проверяется по оценкам качества переходных процессов.
Дата добавления: 2016-09-20; просмотров: 1458;