Структура систем цифрового управления
В системах цифрового управления средства вычислительной техники, в основном, выполняют роль регулятора или регулятора и устройства сравнения. Если объект управления имеет регулируемый параметр аналоговой формы, то возникает потребность в аналого-цифровом преобразователе (АЦП). Для формирования сигналов управления, поступающих на объект в аналоговой форме, дополнительно применяется цифро-аналоговый преобразователь (ЦАП). На рис.5.1. представлены наиболее распространенные структурные схемы систем прямого цифрового управления.
Состояние объекта управления в данный момент времени оценивается на основе информации, получаемой с помощью датчиков.
На рис.5.1А представлена система, в которой ЭВМ выполняет функцию сравнения (определения отклонения) и управляющего устройства (регулятора) и включена в основной контур управления.
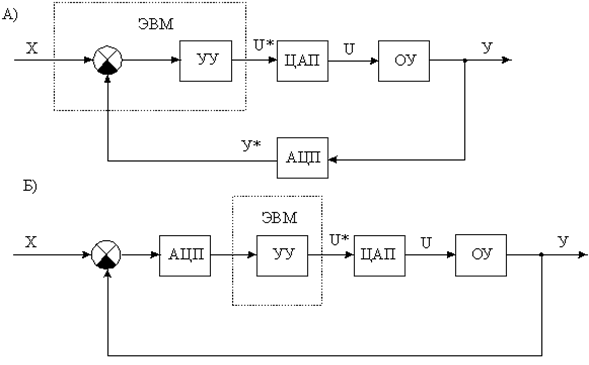
Рис 5.1 Структурные схемы систем цифрового управления
Такой подход стал возможен благодаря повышению надежности работы ЭВМ. В данной структуре наиболее полно используются возможности ЭВМ, особенно при оптимизации работы объекта управления. Если ЭВМ выполняет только функции управляющего устройства, то структура системы имеет вид, представленный на рис.5.1Б. Кроме того, возможно использование ЭВМ для формирования задающих воздействий. При этом реализуются достаточно сложные алгоритмы выработки заданий, связанные с учетом состояний внешней среды, желаемого поведения объекта как цели управления. Возможно использование ЭВМ в качестве последовательного или параллельного корректирующего устройства. Во всех случаях необходимо применение дополнительных устройств ЦАП и АЦП.
Если система управления является многомерной, то необходимо дополнительно установить аналоговый коммутатор и распределитель. Аналоговый коммутатор устанавливается перед АЦП, а распределитель – перед объектом управления. Во всех случаях ЭВМ предоставляет человеку дополнительное информационное обеспечение, необходимое для эффективного управления технологическими и транспортными процессами.
Наибольший эффект прямого цифрового управления достигается за счет того, что часть функций по обработке и анализу информации об управляемом процессе осуществляется не на предварительной стадия синтеза, а самой системой в процессе эксплуатации. Рассмотрим в качестве примера адаптивную самонастраивающуюся систему, построенную по принципу эталонной модели. Наиболее эффективным способом поддержания экстремального режима самонастраивающихся систем является введение в контур самонастройки модели-эталона. Процессы, протекающие в модели-эталоне, соответствуют задаваемым экстремальным условиям. В результате сравнения динамических процессов, происходящих в реальном объекте, с процессами модели можно подстроить характеристики регулятора таким образом, чтобы эти процессы достаточно близко совпадали. Тем самым обеспечивается действие реальной системы в экстремальном режиме. На рис.5.2 представлена структура самонастраивающейся системы с моделью-эталоном (М-Э).

e(t)
Рис. 5.2 Самонастраивающаяся система с моделью-эталоном
Задающее воздействие x(t) поступает одновременно на вход основного замкнутого контура управления и на вход модели-эталона. В результате сравнения получим сигнал e(t), т.е. отклонение параметра объекта управления y(t) от сигнала модели yМ(t). В зависимости от величины и знака сигнала e (t) происходит изменение параметров УУ основного контура. Эти изменения происходят в соответствии с законами самонастройки, которые позволяют свести к нулю за конечный промежуток времени величину e (t), т.е. привести объект управления в экстремальную точку.
Дата добавления: 2016-09-20; просмотров: 1284;