Адаптивные и экстремальные системы управления
Необходимость в адаптивных (приспособляемых) системах управления возникает в связи с усложнением задач управления при отсутствии практической возможности подробного изучения и описания процессов, протекающих в объектах управления при наличии изменяющихся внешних возмущений. Эффект адаптации достигается за счет того, что часть функций по получению, обработке и анализу процессов в объекте управления выполняется в процессе эксплуатации системы. Такое разделение функций способствует более полному использованию информации о протекающих процессах при формировании сигналов управления и позволяет существенно снизить влияния неопределенности на качество управления. Тем самым, адаптивное управление необходимо в тех случаях, когда влияние неопределенности или «неполноты» априорной информации о работе системы становится существенным для обеспечения заданного качества процессов управления. В настоящее время существует следующая классификация адаптивных систем: самонастраивающиеся системы, системы с адаптацией в особых фазовых состояниях и обучающиеся системы.
Класс самонастраивающихся (экстремальных) систем автоматического управления имеет широкое распространение в виду достаточно простой технической реализации. Этот класс систем связан с тем, что ряд объектов управления или технологических процессов обладают экстремальными зависимостями (минимум или максимум) рабочего параметра от управляющих воздействий. К ним относятся мощные электродвигатели постоянного тока, технологические процессы в химической промышленности, различные типы топок, реактивные двигатели самолетов и т. д. Рассмотрим процессы, протекающие в топке при сжигании топлива. При недостаточной подаче воздуха топливо в топке сгорает не полностью и количество выделяемого тепла уменьшается. При избыточной подаче воздуха часть тепла уносится вместе с воздухом. И только при определенном соотношении между количества воздуха и тепла достигается максимальная температура в топке. В турбореактивном двигателе самолета изменением расхода топлива можно добиться получения максимального давления воздуха за компрессором, а следовательно, и максимальной тяги двигателя. При малом и большом расходах топлива давление воздуха за компрессором и тяга падает. Кроме того необходимо отметить, то обстоятельство, что экстремальные точки объектов управления являются «плавающими» во времени и в пространстве.
В общем случае мы можем утверждать о том, что существует экстремум, а при каких значениях управляющего воздействия он достигается – априори неизвестно. В этих условиях система автоматического управления в процессе эксплуатации должна формировать управляющее воздействие, приводящее объект в экстремальное положение, и удерживать его в этом состоянии в условиях возмущений и «плавающего» характера экстремальных точек. Управляющее устройство при этом является экстремальным регулятором.
По способу получения информации о ткущем состоянии объекта экстремальные системы являются беспоисковыми и поисковыми. В беспоисковых системах наилучшее управление определяется в результате использования аналитических зависимостей между желаемым значением рабочего параметра и параметрами регулятора. В поисковых системах, которые являются медленнодействующими, нахождение экстремума может быть выполнено различными способами. Наибольшее распространение получил метод синхронного детектирования, который сводится к оценке производной dy/du, где y – регулируемый (рабочий) параметр объекта управления, u – управляющее воздействие. Структурная схема, иллюстрирующая способ синхронного детектирования представлена на рис. 6.1.
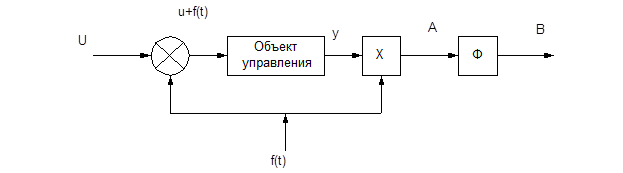
Рис. 6.1 Структура синхронного детектирования
На вход объекта управления, который обладает экстремальной зависимостью y(u), совместно с управляющим воздействием U подается незначительное возмущение в виде регулярного периодического сигнала f(t) = gsinwt, где g больше нуля и достаточно мало. На выходе объекта управления получим y = y(u + gsinwt). Полученное значение y умножается на сигнал f(t). В результате сигнал А примет значение
А =yf(t) = y(u+gsinwt)gsinwt.
Предполагая, что зависимость y(u) является достаточно гладкой функцией, ее можно разложить в степенной ряд и с достаточной степенью точности ограничится первыми членами разложения
Y(u+gsinwt)=y(u)+gsinwt(dy/du) + 0.5g2sin2wt(d2y/du2) + ….. .
Т. к. значение g мало, то можно пренебречь членами высшего порядка и в результате получим
Y(u + gsinwt) » y(u) + gsinwt(dy/du).
Тогда, в результате перемножения сигнал А примет значение
А = y(u)sinwt + g2sin2wt(dy/du).
На выходе фильтра низких частот Ф получим сигнал В
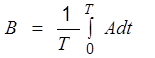 .
.
Если постоянная времени фильтра Т достаточно велика, то получим
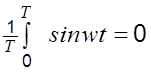
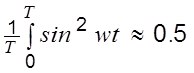 .
.
Следовательно, сигнал В на выходе фильтра пропорционален производной dy/du
 .
.
Техническая реализация синхронного детектирования для целей экстремального управления сводится к организации движения к экстремуму при наличии информации о производной dy/du с обратным знаком, т.е.
du/dt = -dy/du.
После интегрирования получим управляющее воздействие
 .
.
На основании этого, структуру систему экстремального управления можно реализовать в виде, представленном на рис. 6.2.
Рассмотренное выше синхронное детектирование с гармоническим синусоидальным возмущением, как метод поиска экстремума, является вполне надежным и эффективным средством экстремального управления для объектов с непрерывными характеристиками.
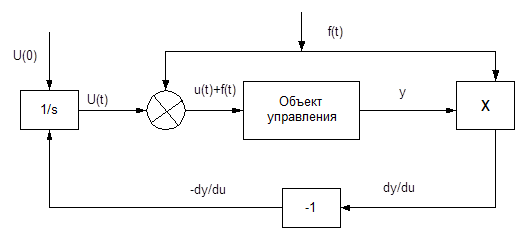
Рис. 6.2 Структура системы экстремального управления
Сигнал U(0) задает начальные условия интегрирования, т.е. является исходной точкой поиска экстремума.
Дата добавления: 2016-09-20; просмотров: 2957;