Поняття жорсткості і механічної міцності конструкції. При розробці конструкції РЕА необхідно забезпечити необхідну жорсткість і механічну міцність її елементів.
Жорсткість конструкції є відношення сили, що діє, до деформації конструкції, викликаної цією силою. Під міцністю конструкції розуміють навантаження, яке може витримати конструкція без залишкової деформації або руйнування. Підвищення міцності конструкції РЕА пов'язане з посиленням її конструктивної основи, застосуванням ребер жорсткості, контрення болтових з'єднань і так далі Особливе значення має підвищення міцності конструкцій, що несуть, і вхідних в них вузлів методами заливки і обволікання. Заливка пеноматериалом дозволяє зробити вузол монолітним при незначному збільшенні маси.
Конструкція як коливальна система. У всіх випадках не можна допускати утворення механічної коливальної системи. Це стосується кріплення монтажних проводів, мікросхем, екранів і інших частин, що входять в РЕА.

|
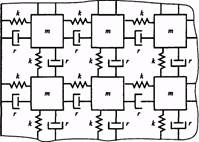
Основними параметрами будь-якої конструкції з позицій реакції на механічні дії є маса, жорсткість і механічний опір (демпфування). При аналізі впливу вібрацій на конструкції модулів останні представляють у вигляді системи із зосередженими параметрами, в якій задані маса виробу m, елемент жорсткості у вигляді пружини і елемент механічного опору у вигляді демпфера, такі, що характеризуються параметрами до і r відповідно.
При необхідності побудови складніших моделей, наприклад пластини зі встановленими на ній модулями, можна скористатися моделлю, приведеною на мал. 6.1.1, і при достатньо великому числі осередків отримати модель системи з розподіленими параметрами.
 Мал. 6.1.1.
Мал. 6.1.1.
|
Найважливішим показником механічної системи є число мір свободи, що визначають положення системи в просторі у будь-який момент часу. Дане число мір свободи конструкції залежить від ступеня її спрощення, тобто модель повинна певною мірою відображати реальну конструкцію і бути досить простою для дослідження.
У системі з однією мірою свободи зовнішній силі F(t) в кожен момент часу протидіятимуть сили інерції маси Fm, жорсткості Fk і демпфування Fr:
F(t)= Fm + Fr + Fk. (6.1.1)
Fm = m d2e/dt2, Fr = r de/dt, Fk = до e.
де e - зсув системи від положення рівноваги під впливом сили F(t).
Лінійне диференціальне рівняння, що описує стан системи у будь-який момент часу:
m d2e/dt2 + r de/dt + до e = F(t). (6.1.2)
Рівняння власних коливань системи можна отримати, прирівнявши F(t) нулю, при цьому отримаємо (без урахування початкової фази):
e = eo exp(-dt) sin wot
де eo - початкові амплітуда коливань; d = г/(2m) - коефіцієнт демпфування; wo =  = 2pfo - власна частота коливань системи з демпфуванням.
= 2pfo - власна частота коливань системи з демпфуванням.
У реальних механічних системах в кожному циклі коливань відбуваються втрати енергії загасання коливань.
Вирішення диференціального рівняння вимушених коливань системи (при F(t)= Fm sin wt) має вигляд:
e = Ao exp(-rwot) sin wot + Ав sin wt.
Перший доданок описує власні коливання системи з частотою, друге - вимушені коливання, де Ao і Ав - амплітуда відповідно власних і вимушених коливань. Коли частота власних коливань системи близька до частоти вимушених, в коливальній системі виникає явище механічного резонансу, що може привести до пошкодження конструкції.
Амортизація конструкції РЕА. Один з ефективних методів підвищення стійкості конструкції, що як транспортується, так і стаціонарної, до дії вібрацій, а також ударних і лінійних навантажень - використання амортизаторів. Дія амортизаторів заснована на демпфуванні резонансних частот, тобто поглинанні частини коливальної енергії. Апаратура, встановлена на амортизаторах, в загальному випадку може бути представлена у вигляді механічної коливальної системи з шістьма мірами свободи: сукупністю зв'язаних коливань, що складаються з лінійних переміщень, і обертальних коливань по кожній з трьох координатних осей.
Ефективність амортизації характеризується коефіцієнтом динамічності або передачі, числове значення якого залежить від відношення частоти вібрацій f, що діють, до частоти амортизованої системи fo.
При розробці схеми амортизації необхідно прагнути до того, щоб система мала мінімальне число власних частот і щоб вони були в 2-3 рази нижче за найменшу частоту обурюючої сили.
Для амортизованої апаратури слід якомога більше зменшувати власну частоту, а для неамортизованої, навпаки, збільшувати, наближаючи її до верхньої межі обурюючих дій або перевищуючи її.
Схеми розміщення амортизаторів. Конструювання системи амортизації РЕА зазвичай починається з вибору типу амортизаторів і схеми їх розміщення. Вибір амортизаторів проводять виходячи з допустимого навантаження і граничних значень параметрів, що характеризують умови експлуатації. До таких параметрів відносяться: температура навколишнього середовища, вологість, механічні навантаження, присутність в атмосфері пари масла, дизельного палива і так далі
 Мал. 6.1.2.
Мал. 6.1.2.
|
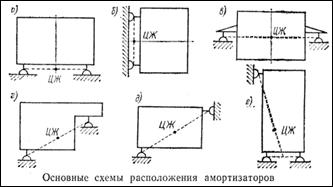
Вибір схеми розташування амортизаторів залежить головним чином від розташування апаратури на носієві і умов динамічної дії. На мал. 6.1.2 представлені основні схеми розташування амортизаторів. Варіант 'а' досить часто використовується для амортизації порівняно невеликих по габаритах блоків. Таке розташування амортизаторів зручне з позицій загальної компоновки блоків на об'єкті. Проте при цьому розташуванні амортизаторів принципово неможливо отримати збіг центру тяжіння (ЦТ) з центром мас (ЦМ) і не отримати раціональної системи. То ж можна сказати про варіант розміщення 'б'. Варіант розміщення 'в' дозволяє отримати раціональну систему, проте таке розташування амортизаторів не завжди зручно при розміщенні на об'єкті. Розміщення типу 'г' і 'д' є різновидом варіанту 'в' і використовується в тому випадку, якщо лицьова панель блоку розміщується поблизу амортизатора, розташованого знизу. Розміщення амортизаторів типу 'е' використовується в стоечной апаратурі, коли висота РЕА значно більше глибини і ширина стійкі. Щоб ослабити коливання стійкі навколо осей х і у, ставлять додатково два амортизатори зверху стійкі.
Міцність конструктивних елементів. Механічну міцність елементів конструкції перевіряють методами опору матеріалів і теорії пружності для простих конструкцій з розподіленим і змішаним навантаженням. У більшості практичних випадків конструкції деталей РЕА мають складнішу конфігурацію, що утрудняє визначення в них напруги. При розрахунках складну деталь замінюють її спрощеною моделлю: балкою, пластиною, рамою.
До балок відносять тіла призматичної форми, довжини яких значно перевищують всі інші геометричні розміри конструкції. Кінці балок затискаються (зваркою, паянням), спираються шарнірно-рухомо (установкою в тих, що направляють) або шарнірно-нерухомо (одиночне гвинтове з'єднання). Пластинами вважають тіла прямокутної форми, товщина яких мала в порівнянні з розмірами підстави. До подібних конструкцій відносять друкарські плати, стінки кожухів приладів, стійкий, панелей і інших подібних конструкцій. Жорстке закріплення краю пластин здійснюється паянням, зваркою, затиском, гвинтовим з'єднанням; шарнірне закріплення - установкою пластин в тих, що направляють, гніздовий з'єднувач. Рамними конструкціями моделюються багатовивідні компоненти: мікросхеми, реле і ін.
При проектуванні конструкції виконують:
- перевірочні розрахунки, коли форма і розміри деталі відомі (виявлені при конструюванні);
- проектні розрахунки, коли розміри небезпечних перетинів невідомі і їх визначають на основі вибраної допустимої напруги;
- розрахунки навантажень, що допускаються, по відомих небезпечних перетинах і допустимій напрузі.
При проведенні перевірочних розрахунків на пружні коливання з урахуванням напряму дії вібрацій виділяють деталі і вузли, що мають найбільші деформації, вибирають розрахункові моделі, розраховують власні частоти, визначають навантаження і порівнюють набутих значень з межами міцності вибраних матеріалів, при необхідності ухвалюють рішення про підвищення міцності конструкції.
Для збільшення віброміцності в конструкції окремих елементів вводяться додаткові кріплення, ребра і рельєфи жорсткості, відбортовки, выдавки, використовуються матеріали з високими демпфуючими властивостями, демпфуючі покриття.
Зовнішні вібраційні дії часто задаються досить вузьким діапазоном частот. У правильно сконструйованій апаратурі власна частота fo конструкції не повинна знаходитися в спектрі частот зовнішніх дій. Хоча будь-яка конструкція володіє декількома значеннями власних частот, проте розрахунок виконується тільки для нижчих значень fo, оскільки деформації конструкцій в цьому випадку будуть максимальними. Якщо нижче значення власної частоти входить в діапазон зовнішніх дій, то конструкцію допрацьовують з метою збільшення fo і виходу із спектру частот зовнішніх дій.
Під жорсткістю конструкції розуміється здатність системи (елементу, деталі) протистояти дії зовнішніх навантажень з деформаціями, що не допускають порушення її працездатності. Кількісно жорсткість оцінюється коефіцієнтом жорсткості l = Р/d, де Р - сила, що діє; d - максимальна деформація. Конструкцію можна представити у вигляді сукупності елементів (деталей), кожен з яких працює як балка певної довжини і перетину, закріплена на одному або обох кінцях. Відомо, що жорсткість затисненої на одному кінці балки, що знаходиться під впливом зосередженого навантаження, обчислюється по виразу EF/l при роботі балки на розтягування або стиснення і по виразу 3EJ/13 при роботі балки на вигин (Е - модуль пружності матеріалу балки; F - площа перетину; J - осьовий момент інерції; l - довжина балки). Чим більше модуль пружності матеріалу, тим вище жорсткість балки. Жорсткість конструкції залежить від довжини, форми і розмірів поперечного перетину балки.
У таблиці приведені параметри матеріалів, що застосовуються для конструкцій РЕА. Питома міцність і жорсткість матеріалів розраховується по наступних виразах:
• для металів: spуд = [s]p/r, sиуд = [s]и2/3/r, Еуд = E/r.
• для неметалів: spуд = [s]p/r, sиуд = [s]и2/3/r
де р — щільність речовини.
Дата добавления: 2016-04-06; просмотров: 2328;