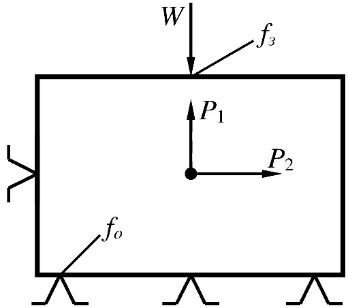
Схемы, предотвращающие поступательное перемещение заготовки.
1 – я схема характерна в основном для схем базирования, с контактом заготовки и базирующих элементов «плоскость-плоскость».
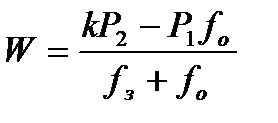
Исходное уравнение равновесия для расчета силы закрепления W
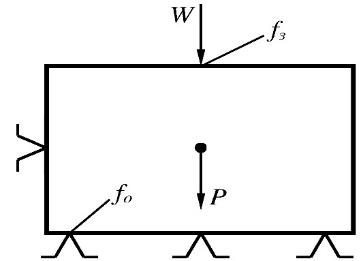
kP2 = Wf3 + (W + P1)fo, (Р1 имеет направление (–)),
kP2 = Wf3 + (W – P1)fo, (Р1 имеет направление (+))
| Схема закрепления | Сила закрепления W |
| для самотормозящих механизмов | для несамотормозящих механизмов |
| Схема 1, в которой сила Р, направленна против опор Схема характерна, например, при протягивании отверстий, зенковании, цековании отверстий на кондукторе. W = kN где: N – дополнительная сдвигающая сила, направленная против силы закрепления. | ||
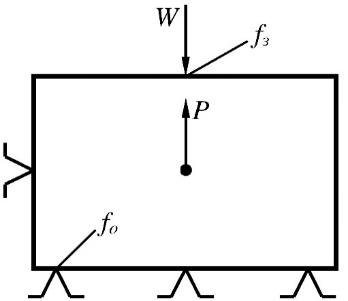
| Схема 2, предотвращающая отрыв от действия силы Р | ||
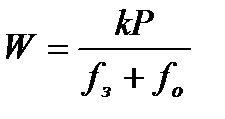
| W = kP | 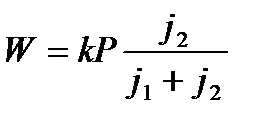
| ||
где: j1 – жесткость стыка зажимного элемента и детали; j2 – жесткость стыка установочного элемента и детали;  = 0,6…0,7 = 0,6…0,7
| |||
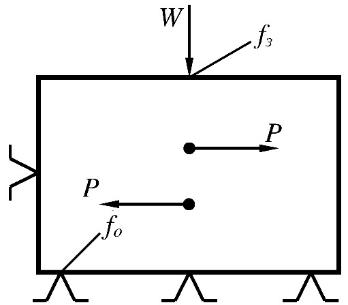
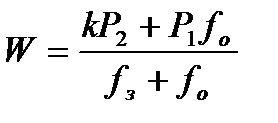
| Схема 3, предотвращающая сдвиг заготовки относительно опор под действием силы Р
Схема характерна в случаях кода меняется направление подачи инструмента, например, при маятниковом фрезеровании шпоночного паза
| ||
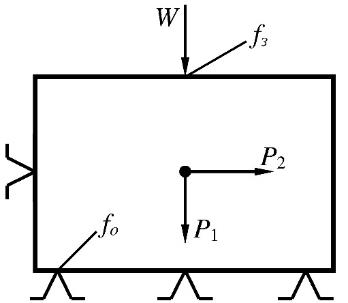
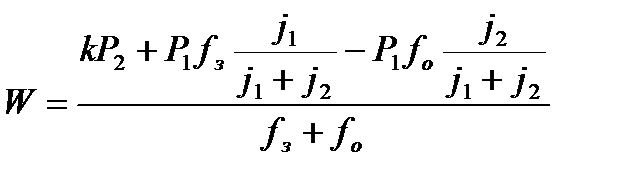
| Схема 4, предотвращающая сдвиг заготовки относительно опор под действием сил Р1 и Р2. Схема характерна в случаях кода сила Р1 направлена против опор, а сила Р2 стремится сдвинуть заготовку в боковом направлении | ||
| 
| ||
где:  = 0,3…0,4 = 0,3…0,4
| |||
| Схема 5, предотвращающая сдвиг заготовки относительно опор под действием сил Р1 и Р2. Схема характерна в случаях кода сила Р1 направлена навстречу силе W, а сила Р2 стремится сдвинуть заготовку в боковом направлении | ||
| 
| ||
| Схема 6, предотвращающая смещение заготовки от силы Р вокруг опоры О | ||
| |||
Дата добавления: 2016-02-16; просмотров: 1332;