Токарный резьбонарезной станок 103 повышенной точности
В инструментальном производстве при изготовлении резьбового инструмента применяют токарно-винторезные станки повышенной точности. Эти станки имеют точные ходовые винты и корректирующие устройства. Корректирующие устройства служат для поворота гайки винта, в результате чего выбирается люфт в винтовой паре, что обеспечивает получение точного шага нарезаемой резьбы. Например, накопленная погрешность шага резьбы на длине 50 мм - 0,003 мм, а на длине 300 мм - 0,005 мм. На станках без корректирующего устройства эти погрешности в 4 - 5 раз больше. Существует несколько способов коррекции: созданием дополнительного поворота гайки, дополнительного осевого перемещения ходового винта и применением дифференциального механизма для дополнительного поворота винта.
Поворот гайки с целью коррекции шага ходового винта может быть осуществлен с помощью установленной на суппорте станка коррекционной линейки, соединенной системой тяг с гайкой. При установке линейки под углом αk оси центров станка одновременно с продольной подачей суппорта будет перемещаться ползун с копиром, поворачивая через систему тяг гайку ходового винта.
Между величиной перемещения h1 ползуна за один оборот шпинделя, подъемом h2 тяги гайки и продольным перемещением суппорта S существует следующая зависимость: h1=Stgα, h2=h1tgβ, откуда
h2=Stgαtgβ
где α - угол наклона линейки к оси центров станка;
β - угол копира.
 Вместе с тем величина подъема h2 на радиусе r при повороте гайки на угол γ будет h2= rγ, откуда угол поворота гайки
Вместе с тем величина подъема h2 на радиусе r при повороте гайки на угол γ будет h2= rγ, откуда угол поворота гайки
В результате величина дополнительного продольного перемещения суппорта за один оборот шпинделя в зависимости от угла γ поворота гайки

∆
где tв - шаг винта.
Осевое перемещение ходового винта станка создается при помощи коррекционной линейки, соединенной с суппортом.
При продольном движении суппорта линейка через реечную передачу будет поворачивать гильзу, имеющую резьбу с шагом tr. Внутри гильзы свободно вращается конец ходового винта. Гильза при вращении получает продольное перемещение ∆S и передает его ходовому винту, который, таким образом, дополнительно перемещается в осевом направлении.
Число оборотов реечного зубчатого колеса np.k за один оборот шпинделя

где Sпоп=Sпрtgα - поперечная подача;
Sпр - продольная подача;
m и z - модуль и число зубьев реечного колеса.
Дополнительное продольное перемещение суппорта вместе с ходовым винтом станка за один оборот шпинделя:

∆
Коррекция шага ходового винта при помощи дифференциала. Назначение дифференциала состоит в сложении двух движений: основного - от коробки подач и дополнительного - от коррекционной линейки.
Если линейка поставлена горизонтально, правое коническое зубчатое колесо дифференциала будет неподвижно, и уравнение кинематического баланса для цепи от шпинделя до ходового винта будет иметь следующий вид:

где Sпр - продольная подача;
iшп - передаточное отношение гитары подач;
iкп - передаточное отношение коробки подач;
iдиф - передаточное отношение дифференциала;
tв - шаг ходового винта.
Обозначив произведение трех передаточных отношений через iобщ, получим,Sпр=iобщtв. Если коррекционная линейка будет установлена под углом α к оси центров станка, то при ее продольном перемещении вместе с суппортом дифференциал получит от реечной передачи дополнительное вращение. Уравнение кинематического баланса с учетом дополнительного перемещения суппорта примет тогда следующий вид:
Sпр=(iобщ±∆i)tв
Величину ∆i - дополнительное передаточное отношение всей кинематической цепи шпиндель - ходовой винт можно определить по формуле

∆
где l=Sпрtgα - величина перемещения рейки;
½ - передаточное отношение дифференциала.
Из предыдущего уравнения имеем:

∆
Подставим это значение в уравнение кинематического баланса, получим:
∆ 
∆
 откуда
откуда
На рис.5, а) изображена кинематическая схема токарно-винторезного станка повышенной точности 103.
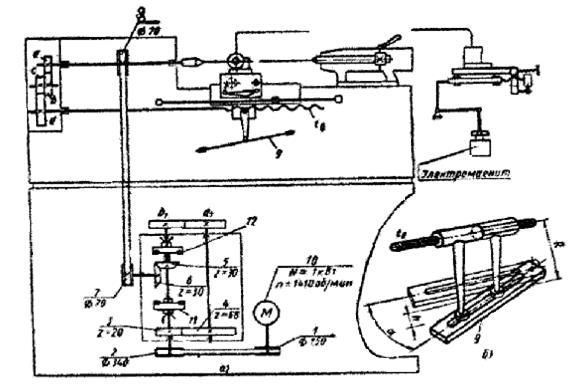
Рис.5. Кинематическая схема токарно-винторезного станка 103
Техническая характеристика станка: диаметр нарезаемых резьб 5 - 30 мм; наибольшая длина резьбы 300 мм; шаг нарезаемых резьб 0,25 - 5 мм. Станок работает по следующему циклу: подвод резца к заготовке, рабочий ход, отвод резца и быстрый обратный ход. Цикл работ станка осуществляется электросхемой.
Вращение шпинделя осуществляется по следующей кинематической цепи: электродвигатель 10, ременная передача 1-2, цилиндрическая пара 3 - 4, сменные колеса а – b, обгонная муфта 12, коническая пара 5 - 6, ременная передача 7 - 8. Обгонная муфта II проскальзывает. В станке две пары сменных шкивов 1 - 2, перестановка которых расширяет диапазон регулирования частоты вращения (39 - 355 и 70 - 630 об/мин). Шпиндель получает обратное ускоренное вращение от реверсивного двигателя 10 через муфту обгона 11, далее конические колеса 5-6, шкивы 7 - 8.
Продольное перемещение cyппорта осуществляется от шпинделя через сменные колеса гитары а - b, с - d и ходовой винт. Настройка этой цепи производится по формуле

где tн - шаг нарезаемой резьбы;
tв - шаг ходового винта.
Ошибка шага нарезаемой резьбы в станке исправляется поворотом коррекционной линейки 9 (рис. 5, б). Величину ее поворота определяют исходя из следующих соображений. Предположим, что требуется нарезать винт с шагом t0 . В результате термической обработки винта шаг будет отличаться от номинального t0 на величину ∆t. Чтобы компенсировать изменение шага резьбы, на станке нарезается резьба с шагом tн=t0+∆t, где t0 - требуемый шаг резьбы, а ∆t - величина коррекции шага резьбы.
Настройка станка на t0 производится при помощи гитары сменных колес а - b, с - d, а на величину коррекции ∆t - поворотом линейки на угол α.
Расчетное уравнение кинематической цепи для перемещения суппорта:

(5)
Первый член левой части уравнения представляет собой путь суппорта в результате вращения ходового винта, второй член - путь поворота гайки. Сделав некоторые преобразования, выражение ( 5 ) можно записать так:

(6)
Решая уравнение ( 6 ) относительно tgα, получим:

(7)
Обозначив, 2πR/tв=р, получим

(8)
Для компенсации погрешностей шага ходового винта станка устанавливается другая линейка. Профиль линейки выполняется криволинейным. Величина впадины или выступа определяется величиной погрешности соответствующего шага ходового винта.
Дата добавления: 2016-03-27; просмотров: 1276;