Применение кольцевого тестирования для диагностики последовательностных схем.
1. Не зависящие от входа устройства с памятью.
Рассмотрим построения ЛПОС для автономного ДУ (генератора), которое после начальной установки функционирует под действием тактовых сигналов. Одна из особенностей автономного ДУ состоит в том, что в нем отсутствуют информационные входы, на которые могут подаваться тестовые воздействия. Однако если ДУ аппаратурно неизбыточно, то всякая его неисправность проявляется на выходах в процессе функционирования. Это позволяет считать режим функционирования автономного ДУ режимом его тестирования при потактном наблюдении выходов. Для кольцевой ЛПОС характерно установление факта исправности после окончания периода тестирования независимо от того, является ДУ периодическим или непериодическим генератором.
Сначала рассмотрим синтез ЛПОС для одновыходного ДУ, заданного соотношением
 (3.6)
(3.6)
в котором каждый аргумент может быть несущественным. Структура ЛПОС одновыходного ДУ приведена на рис.7.1, которая содержит корректирующее устройство и схемы свертки по mod2. В состав КУ входят сдвиговый регистр Рг ν и комбинационная схема К. Здесь корректирующее устройство наряду с формированием требуемого периода T фиксирует посредством Рг ν результаты тестирования.
Будем функцию обратной связи ЛПОС задавать в виде
период T отождествлять с показателем неприводимого многочлена

над GF(2).
Приведем процедуру синтеза ДУ в базисе Жегалкина. Для этого перепишем (7.1) в виде многочлена

где  = 0 или 1;
= 0 или 1;  – подмножества множества (1,…,ν). Затем найдем функцию КУ со схемой свертки M2 на выходе (рис.3.6):
– подмножества множества (1,…,ν). Затем найдем функцию КУ со схемой свертки M2 на выходе (рис.3.6):
 (3.7)
(3.7)
где  ,
,  (i = 1,…,ν) – коэффициенты линейной части функции;
(i = 1,…,ν) – коэффициенты линейной части функции;  – коэффициенты нелинейной части. Поскольку максимальное значение переменной j аргумента y(τ – j) равно ν, то аргументы (7.2) формируются на сдвиговом регистре Рг ν длины не более ν. Слагаемые
– коэффициенты нелинейной части. Поскольку максимальное значение переменной j аргумента y(τ – j) равно ν, то аргументы (7.2) формируются на сдвиговом регистре Рг ν длины не более ν. Слагаемые  функции (3.7) реализуются соединениями и схемами совпадения комбинационной части К корректирующего устройства. Таким образом, исправная ЛПОС представляет собой структуру из двух автономных устройств: ДУ и КУ с цепью обратной связи от выхода M2 ко входу последовательного занесения кода в Рг ν. Причем свойства периодичности последнего определяются исправностью первого.
функции (3.7) реализуются соединениями и схемами совпадения комбинационной части К корректирующего устройства. Таким образом, исправная ЛПОС представляет собой структуру из двух автономных устройств: ДУ и КУ с цепью обратной связи от выхода M2 ко входу последовательного занесения кода в Рг ν. Причем свойства периодичности последнего определяются исправностью первого.
Рис.3.3.
При установке ЛПОС в начальное состояние необходимо согласовать состояния ДУ и КУ. После установки ДУ по специальным установочным входам упорядоченный набор аргументов (y(τ – 1),…, y(τ – ν)) функции (7.1) принимает значения (y1(0),…,yv(0)). Этим набором определяется начальное состояние КУ. Записью значений (y1(0),…,yv(0)) в регистр Рг ν и выполняется установка начального состояния корректирующего устройства.
Функционирование исправной ЛПОС оказывается строго периодическим и при максимальном числе разрядов Рг ν равным ν описывается соотношением

 ,
,
где  – вектор-столбец значений выходов Рг ν; H – сопровождающая матрица неприводимого многочлена
– вектор-столбец значений выходов Рг ν; H – сопровождающая матрица неприводимого многочлена  ; deg g = ν. Исправность ДУ определяется наблюдением выходов Рг ν в такте T, для которого должно выполняться равенство
; deg g = ν. Исправность ДУ определяется наблюдением выходов Рг ν в такте T, для которого должно выполняться равенство
 .
.
Рассмотрим многовыходное ДУ, реализующее соотношение

 (
( 
 ), (3.8)
), (3.8)
Построение ЛПОС периода Т будем выполнять путем построения корректирующего устройства КУi относительно каждого выхода Д . Синтез КУi произведем по правилам синтеза корректирующего устройства одновыходного ДУ. При этом для каждого КУi многочлен обратной связи  должен принадлежать показателю Ti, являющемуся делителем T. В этом случае ЛПОС содержит m раздельно реализованных КУi, которые образуют КУ системы (рис. 3.4).
должен принадлежать показателю Ti, являющемуся делителем T. В этом случае ЛПОС содержит m раздельно реализованных КУi, которые образуют КУ системы (рис. 3.4).
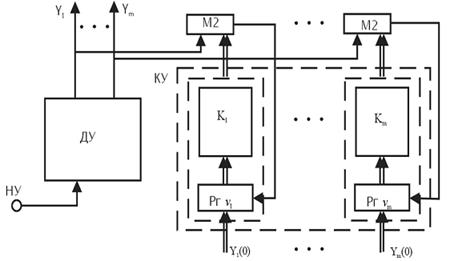
Рис 3.4
Установка начального состояния ЛПОС требует согласования начальных состояний элементов памяти частей системы. После установки ДУ по специальным входам в начальное состояние, предусмотренное для обеспечения режима нормального функционирования (генерирования), упорядоченный набор переменных


в момент τ = 0 имеет значения 
Тогда состояния  регистров Рг νi в момент τ = 0 определяются так:
регистров Рг νi в момент τ = 0 определяются так:  (
(  ).
).
Таким образом, по начальному состоянию ДУ определяется начальное состояние КУ. Этим обеспечивается согласование состояний частей ЛПОС, вследствие которого система функционирует строго периодически с периодом T, равным наименьшему общему кратному показателей (T1,…,Tm). Решение об исправности ДУ принимается в случае выполнения равенств
 ,
,
истинность которых устанавливается в результате наблюдения выходов регистров корректирующего устройства.
Дата добавления: 2016-03-15; просмотров: 1383;