Классификация элементов автоматических систем.
Теория Автоматического Управления (ТАУ)
Основные термины и определения ТАУ.
Основные понятия.
Системы управления современными химико-технологическими процессами характеризуются большим количеством технологических параметров, число которых может достигать нескольких тысяч. Для поддержания требуемого режима работы, а в конечном итоге – качества выпускаемой продукции, все эти величины необходимо поддерживать постоянными или изменять по определенному закону.
Физические величины, определяющие ход технологического процесса, называются параметрами технологического процесса. Например, параметрами технологического процесса могут быть: температура, давление, расход, напряжение и т.д.
Параметр технологического процесса, который необходимо поддерживать постоянным или изменять по определенному закону, называется регулируемой величиной или регулируемым параметром.
Значение регулируемой величины в рассматриваемый момент времени называется мгновенным значением.
Значение регулируемой величины, полученное в рассматриваемый момент времени на основании данных некоторого измерительного прибора называется ее измеренным значением.
Пример 1.Схема ручного регулирования температуры сушильного шкафа.
 Требуется вручную поддерживать температуру в сушильном шкафу на уровне Тзад.
Требуется вручную поддерживать температуру в сушильном шкафу на уровне Тзад.
Человек-оператор в зависимости от показаний ртутного термометра РТ включает или выключает нагревательный элемент Н с помощью рубильника Р. ¨
Объект управления (объект регулирования, ОУ) – устройство, требуемый режим работы которого должен поддерживаться извне специально организованными управляющими воздействиями.
Управление – формирование управляющих воздействий, обеспечивающих требуемый режим работы ОУ.
Регулирование – частный вид управления, когда задачей является обеспечение постоянства какой-либо выходной величины ОУ.
Автоматическое управление – управление, осуществляемое без непосредственного участия человека.
Входное воздействие (Х) – воздействие, подаваемое на вход системы или устройства.
Выходное воздействие (Y) – воздействие, выдаваемое на выходе системы или устройства.
Внешнее воздействие – воздействие внешней среды на систему.
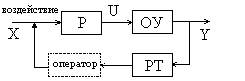 |
Структурная схема системы регулирования к примеру 1:
Рис. 1-2
Пример 2.Схема автоматического регулирования температуры сушильного шкафа.
В схеме используется ртутный термометр с контактами РТК. При повышении температуры до заданной контакты замыкаются столбиком ртути, катушка релейного элемента РЭ возбуждается и цепь нагревателя Н размыкается контактом РЭ. При понижении температуры контакты термометра размыкаются, реле обесточивается, возобновляя подачу энергии на объект (см. рис. 1-3). ¨
 |
Рис. 1-3
Пример 3.Схема АСР температуры с измерительным мостом.
 | |||
 |
Рис. 1-4
При температуре объекта, равной заданной, измерительный мост М уравновешен, на вход электронного усилителя ЭУ сигнал не поступает и система находится в равновесии. При отклонении температуры изменяется сопротивление терморезистора RТ и равновесие моста нарушается. На входе ЭУ появляется напряжение, фаза которого зависит от знака отклонения температуры от заданной. Напряжение, усиленное в ЭУ, поступает на двигатель Д, который перемещает движок автотрансформатора АТ в соответствующую сторону. При достижении температуры, равной заданной, мост сбалансируется и двигатель отключится.
Величина заданного значения температуры устанавливается с помощью резистора Rзад. ¨
Исходя из описанных примеров, можно определить типовую структурную схему одноконтурной АСР (см. рис. 1-5). Принятые обозначения:
 x - задающее воздействие (задание),
x - задающее воздействие (задание),
e = х - у - ошибка регулирования,
u - управляющее воздействие,
f - возмущающее воздействие (возмуще-
ние).
Рис. 1-5
Определения:
Задающее воздействие (то же, что входное воздействие Х) - воздействие на систему, определяющее требуемый закон изменения регулируемой величины).
Управляющее воздействие (u) - воздействие управляющего устройства на объект управления.
Управляющее устройство (УУ) - устройство, осуществляющее воздействие на объект управления с целью обеспечения требуемого режима работы.
Возмущающее воздействие (f) - воздействие, стремящееся нарушить требуемую функциональную связь между задающим воздействием и регулируемой величиной.
Ошибка управления (е = х - у) - разность между предписанным (х) и действительным (у) значениями регулируемой величины.
Регулятор (Р) - комплекс устройств, присоединяемых к регулируемому объекту и обеспечивающих автоматическое поддержание заданного значения его регулируемой величины или автоматическое изменение ее по определенному закону.
Автоматическая система регулирования (АСР) - автоматическая система с замкнутой цепью воздействия, в котором управление (u) вырабатывается в результате сравнения истинного значения у с заданным значением х.
Дополнительная связь в структурной схеме АСР, направленная от выхода к входу рассматриваемого участка цепи воздействий, называется обратной связью (ОС). Обратная связь может быть отрицательной или положительной.
Классификация АСР.
1. По назначению (по характеру изменения задания):
· стабилизирующая АСР - система, алгоритм функционирования которой содержит предписание поддерживать регулируемую величину на постоянном значении (x = const);
· программная АСР - система, алгоритм функционирования которой содержит предписание изменять регулируемую величину в соответствии с заранее заданной функцией (x изменяется программно);
· следящая АСР - система, алгоритм функционирования которой содержит предписание изменять регулируемую величину в зависимости от заранее неизвестной величины на входе АСР (x = var).
2. По количеству контуров:
· одноконтурные - содержащие один контур,
· многоконтурные - содержащие несколько контуров.
3. По числу регулируемых величин:
· одномерные - системы с 1 регулируемой величиной,
· многомерные - системы с несколькими регулируемыми величинами.
Многомерные АСР в свою очередь подразделяются на системы:
а) несвязанного регулирования, в которых регуляторы непосредственно не связаны и могут взаимодействовать только через общий для них объект управления;
б) связанного регулирования, в которых регуляторы различных параметров одного и того же технологического процесса связаны между собой вне объекта регулирования.
4. По функциональному назначению:
АСР температуры, давления, расхода, уровня, напряжения и т.д.
5. По характеру используемых для управления сигналов:
· непрерывные,
· дискретные (релейные, импульсные, цифровые).
6. По характеру математических соотношений:
· линейные, для которых справедлив принцип суперпозиции;
· нелинейные.
Принцип суперпозиции (наложения): Если на вход объекта подается несколько входных воздействий, то реакция объекта на сумму входных воздействий равна сумме реакций объекта на каждое воздействие в отдельности:
 х1 L(х1 + х2) = L(х1) + L(х2),
х1 L(х1 + х2) = L(х1) + L(х2),
х2 у где L - линейная функция (интегрирование, диф-
ференцирование и т.д.).
7. По виду используемой для регулирования энергии:
· пневматические,
· гидравлические,
· электрические,
· механические и др.
8. По принципу регулирования:
· по отклонению:
 Подавляющее большинство систем построено по принципу обратной связи - регулирования по отклонению.
Подавляющее большинство систем построено по принципу обратной связи - регулирования по отклонению.




 Элемент называется сумматором. Его выходной сигнал равен сумме входных сигналов. Зачерненный сектор говорит о том, что данный входной сигнал надо брать с противоположным знаком.
Элемент называется сумматором. Его выходной сигнал равен сумме входных сигналов. Зачерненный сектор говорит о том, что данный входной сигнал надо брать с противоположным знаком.
·  по возмущению.
по возмущению.
К - усилитель с коэффициентом усиления К.
· комбинированные - сочетают в себе особенности предыдущих АСР.
·
 Этот способ достигает высокого качества управления, однако его применение ограничено тем, что возмущающее воздействие f не всегда можно измерить.
Этот способ достигает высокого качества управления, однако его применение ограничено тем, что возмущающее воздействие f не всегда можно измерить.
Классификация элементов автоматических систем.
1. По функциональному назначению:
· измерительные,
· усилительно-преобразовательные,
· исполнительные,
· корректирующие.
2. По виду энергии, используемой для работы:
· электрические,
· гидравлические,
· пневматические,
· механические,
· комбинированные.
3. По наличию или отсутствию вспомогательного источника энергии:
· активные (с источником энергии),
· пассивные (без источника).
4. По характеру математических соотношений:
· линейные
· нелинейные.
5. По поведению в статическом режиме:
· статические, у которых имеется однозначная зависимость между входным и выходным воздействиями (состояние статики). Примером является любой тепловой объект.
· астатические - у которых эта зависимость отсутствует. Пример: Зависимость угла поворота ротора электродвигателя от приложенного напряжения. При подаче напряжения угол поворота будет постоянно возрастать, поэтому однозначной зависимости у него нет.
Дата добавления: 2016-02-24; просмотров: 1133;