ОСНОВНЫЕ ЗАДАЧИ И ПРИНЦИПЫ УПРАВЛЕНИЯ 1 страница
Для реализации автоматического управления необходимо иметь то, чем управляют, и то что управляет, т.е. управляемую и управляющую части. Управляемая часть называется управляемым объектом (УО), а управляющая - автоматическим управляющим устройством (УУ) (рис. 1.1).
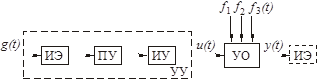
Рисунок 1.1 – Структурная схема АСУ
Совокупность УО и УУ, взаимодействующих между собой, называется автоматической системой (АС) или автоматизированной системой управления (АСУ).
| |
На АС действуют всевозможные воздействия, изменяющиеся во времени t. Основными из них являются: управляющие u(t), возмущающие f1 (t), f2 (t),… и задающие g(t) (управляющие).
u(t) вырабатывается УУ для оказания целенаправленного воздействия на ОУ.
f1(t), f2(t),…, наоборот, вызывают нежелательные, а часто непредусмотренные отклонения (возмущения) y(t). В качестве f(t) могут быть изменения температуры окружающей среды, электрическая нагрузка системы электроснабжения и т.п. К f(t) относятся также и помехи, которые могут быть внешними и внутренними по отношению к АС.
Необходимость в управлении возникает тогда, когда нормальный ход процесса y(t) нарушается в результате различного рода возмущений.
g(t) является заранее предусмотренным воздействием, согласно которому УУ осуществляет u(t) на УО. Задача АС состоит в том, чтобы возможно точнее воспроизводить на выходе задаваемый закон изменения g(t) и возможно полнее подавлять влияние f(t), а также других внешних и внутренних помех, если они имеются.
Воздействия и их направления на функциональной схеме обозначаются стрелками.
Отдельные устройства, составляющие АС, называют элементами или звеньями, а их последовательное соединение – цепью воздействий. В ТАУ звенья принято обозначать в виде прямоугольников.

Рисунок 1.2 – Входные и выходные воздействия звена
Входные воздействия x(t) и f(t) обозначаются направленными к звену стрелками с соответствующими буквенными символами (рис. 1.2).
Величины, изменяющиеся в зависимости от x(t), называются выходными и обозначаются выходящими из звена стрелками с соответствующими буквенными символами. z(t), как правило, управляемые величины АС.
Таким образом, каждое звено и АС имеют свои входы и выходы. Объект, имеющий несколько выходных (управляемых) величин, называется многомерным, и АС с многомерным УО – многомерной (рис. 1.3). Воздействия, поступающие на звено или АС извне, называются внешними. Воздействия одного звена АС на другое или воздействия, возникающие внутри звена (устройства), называются внутренними.

| |
Воздействия могут быть регулярными и случайными. Регулярные изменяются по известным, определенным законам. Они определены (детерминированы), т.е. могут быть точно предсказаны для любого момента времени t (рис. 1.4, а, б).
а)
б)
в)
Рисунок 1.4 – Графики изменения регулярных и случайных воздействий
Недетерминированные воздействия называются случайными (рис. 1.4, в).
Если звено пропускает сигнал лишь в одном направлении с входа на выход и z(t), изменяющаяся в зависимости от входной x(t), не оказывает обратного воздействия на x(t), то такое звено называется однонаправленного действия (детектирующим) (рис. 1.5). А цепь, состоящая из таких звеньев однонаправленной (детектирующей) цепью. Цепь может быть разомкнутой и замкнутой. Замкнутой называется однонаправленная цепь, выход которой соединен со входом (рис. 1.6).
Замкнутую цепь принято называть контуром.

| 
|
Рисунок 1.5 – Блок-схема Рисунок 1.6 – Блок-схема
однонаправленной цепи замкнутой цепи
Принцип действия всей АС в целом показывается функциональной (структурной) или блок-схемой. Чтобы осуществить практически любую АС, надо в соответствии с полученной функциональной схемой составить принципиальную схему системы, т.е. необходимо выбрать принцип действия каждого из звеньев системы.
| |
1.2 Принципы управления и регулирования [3,с.12-18; 4,с.8-20]
Величины y, f, и g в зависимости от природы ОУ могут связываться различными математическими зависимостями. В общем виде это можно записать:
 ,
,
где А- оператор, определяющий вид зависимости. В простейшем случае, когда это обычная функциональная зависимость:

объект является безинерционным. Эта зависимость или ее графическое изображение называют статической характеристикой объекта.
Если объект обладает инерцией, то изменение у, под действием f или g происходит не мгновенно. Объект в этом случае будет динамическим, а у, f и g связаны дифференциальными уравнениями.
Изменения выходных величин у в требуемом нормальном ходе процесса определяются совокупностью правил, предписаний или математических зависимостей, называемых алгоритмом функционирования системы, который составляется на основе технологических (или других) требований и в ТАУ считается заданным (например, регулирование напряжения, температуры).
По заданному алгоритму функционирования должен быть построен алгоритм управления, определяющий такое изменение g, которым с заданной точностью обеспечивается выполнение алгоритма функционирования. Алгоритм управления зависит как от алгоритма функционирования, так и от динамических свойств системы.
| |
1.2.1 Принцип разомкнутого управления
Сущность принципа состоит в том, что алгоритм управления строится только на основании заданного алгоритма функционирования и не связан с возмущениями f или выходными величинами процесса у. Функциональная схема системы, построенной на этом принципе, показана на рис. 1.7, на котором блок ЗП – задатчик программы.
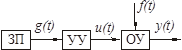
Рисунок 1.7 – Функциональная схема системы разомкнутого управления
Работа всех элементов АС жестко и однозначно связана с задающим воздействием g(t). Разомкнутая АС обладает свойствами однонаправленного действия. Жесткой и однозначной называется такая связь двух переменных, при которой любому значению одной переменной соответствует одно, строго пропорциональное значение другой.
Задание y(t) алгоритма управления может вырабатываться как специальным задатчиком программы (ЗП), так и заранее вкладываться в конструкцию УУ.
АС, в которых работа всех звеньев однонаправленной разомкнутой цепи жестко связана с задающим воздействием и управляемая величина не контролируется, называются разомкнутыми АС управления по задающему воздействию. Связь между g и u выражается зависимостью:
 ,
,
где k – коэффициент пропорциональности.
Недостаток таких систем – отсутствие конторя y(t). Поэтому появление значительного f(t) может вызвать отклонение y(t) от установленных алгоритмом функционирования. Достоинство таких АС – быстродействие и простота. По этому принципу построены устройства пуска и остановки, барабан музыкальной шкатулки, магнитофон и т. п.
1.2.2 Принцип компенсации (управление по возмущению)
| |
Функциональная схема такой системы показана на рис. 1.8.
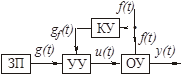
Рисунок 1.8 – Функциональная схема системы с управлением по возмущению
Действующее на ОУ возмущение f(t) измеряется компенсационным устройством (КУ), на выходе которого вырабатывается управляющее воздействие gf (t).
Системы, в которых осуществляется автоматическая компенсация влияния одного или нескольких возмущающих воздействий на неконтролируемую управляемую величину, называется АС регулирования по возмущению. Связь между g, f и u выражается зависимостью:
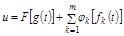 .
.
Недостатки таких систем: низкая точность работы, т.к. невозможно полностью компенсировать влияние из-за технической сложности точного измерения fk и полученные зависимости jк; управляемая величина не контролируется.
Достоинства этих АС – быстрота действия; возможность прогнозировать ожидаемый результат.
Пример таких систем – компаундирование генератора постоянного тока, обеспечивающее неизменность напряжения при изменениях нагрузки.
1.2.3 Принцип обратной связи. Регулирование по отклонению
Для того, чтобы добиться эффективного управления, необходимо контролировать выходную управляемую величину, т.е. контролировать выполнение задающей величины (алгоритма функционирования). В случае отклонений необходимо добиться правильного выполнения. Для осуществления этого используют АС, построенные по принципу обратной связи (ОС).
Функциональная схема такой системы имеет вид, показанный на рис. 1.9.
| |
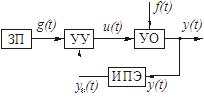
Рисунок 1.9 - Функциональная схема системы с регулированием по отклонению
Коррективы в процессе управления вводятся по фактическому значению у. Для этого вводится дополнительная связь, в которую могут входить элементы для измерения у и выработки воздействия y*(t) на УУ (ИПЭ – измерительно-преобразовательный элемент на рис. 1.9). Схема имеет вид замкнутой цепи. Так как направление передачи воздействия в дополнительной связи обратно направлению передачи основного воздействия на УО, введенная дополнительная связь называется обратной связью.
В управлении преимущественно распространен частный вид замкнутой системы, в которой алгоритм управления (величина управляющего воздействия u) осуществляется не по значению у, а по их отклонениям от задающего входного воздействия g, определяемого алгоритмом функционирования
 (1.1)
(1.1)
Поскольку у* вычитается из g, то обратная связь называется отрицательной ОС. Функциональная схема АС с отрицательной ОС показана на рис. 1.10.
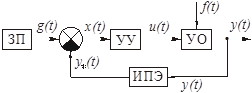
Рисунок 1.10 – Функциональная схема АСУ с отрицательной ОС
В схеме имеется элемент сравнения - сумматор, осуществляющий вычитание y*(t) из g(t) и вырабатывающий величину х, называемую отклонением или ошибкой управления. Слагаемые g и y*, обозначенны подходящими стрелками, сумма х – отходящей стрелкой. Вычитаемое y*(t)обозначается или знаком минус, или зачернением сектора к которому оно подходит.
| |
 .
.
УУ, вырабатывающее управляющее воздействие u(t) образует по отношению к выходу объекта отрицательную ОС, поскольку знак х, как видно из формулы (1.1), обратен знаку у. Физически это означает, что УУ вырабатывает в системе изменение у, направленное навстречу начальному отклонению, вызвавшему работу УУ, т.е. стремится компенсировать возникшие отклонения. Причем для АС совершенно безразлично в результате чего произошло отклонение.
ОС могут быть гибкими и жесткими, в зависимости от исполнения ИПЭ. Гибкие ОС действуют только во время переходных процессов, а жесткие - как при переходных, так и при установившихся.
Системы, в которых используется ОС, называются замкнутыми АСУ (или регулирования) по отклонению.
Преимущество таких систем: универсальность, т.к. автоматическое управление или регулирование ОУ осуществляется как при изменении задающего воздействия g(t), так и при изменении возмущающих воздействий; высокая точность, т.к. принцип действия АСУ основан на уменьшении ошибки х.
Недостаток – склонность к колебаниям из-за наличия замкнутого контура. При резком увеличении g(t) начинающееся увеличение y(t) за счет возросшей ошибки х=g‑y > 0 может продолжаться и после прекращения роста g(t) из-за инерционности отдельных элементов АСУ. И может наступить момент, когда y(t) станет больше g(t), т.е. x(t) поменяет знак и управляющее воздействие u(t) поменяют знак, и y(t) начнет уменьшаться. Затем, x(t) снова станет положительной и т.д. В результате этого и возникают колебания управляемой величины y(t).
Примером АС, построенных на принципе регулирования по отклонению, могут служить системы регулирования уровня воды в котле (Ползунова И.Н.) и угловой скорости паровой машины (Дж. Уатта), схемы автоматического регулирования напряжения генератора.
Управление в зависимости от отклонения называется регулированием. УУ в этом случае называется автоматическим регулятором, а образованная УО и регулятором замкнутая система – системой автоматического регулирования (САР).
Кроме указанных трех основных принципов управления на практике широко применяются АС с комбинированным управлением, сочетающем принципы компенсации и обратной связи и содержащим замкнутую и разомкнутую цепи воздействия.
1.3 Режимы работы АС. Характеристика процесса управления [4,с.20-25]
Различают два режима работы АС: динамический и статический.
| |
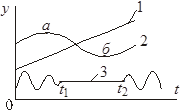
Рисунок 1.11 – Режимы работы АСУ
Т.е. динамический режим характеризуется так,что
Статическим называется режим работыАС (кривая 3 на рис. 1.11), при котором управляемая (выходная) величина во времени постоянна, а первая производная равна нулю :
 .
.
При статическом режиме входные воздействия во времени постоянны или равны нулю. После того, как у станет постоянной (отрезок t1 - t2), в АС устанавливается состояние равновесия.
Процесс установления заданного состояния АС или заданного изменения управляемой величины во времени (кривые 1-3), называется процессом управления или регулирования.
Процессы управления делятся на неустановившиеся и установившиеся.
Неустановившийся процесс может быть переходным и вынужденным.
| |

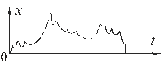
а) б) в)
Рисунок 1.12 – Виды переходных процессов на выходе АСУ
Неустановившийся вынужденный процесс управления АС – это движение системы под действием хотя бы одного или нескольких случайных входных воздействий. Неустановившийся вынужденный процесс может быть стационарным и случайным (нестационарным).
При стационарном процессе изменение y(t) представляет собой случайный процесс с постоянными во времени вероятностными характеристиками.
При случайном (нестационарном) процессе движение АС происходит под действием случайных входных воздействий, а y(t) представляет собой случайный процесс с изменяющимися во времени вероятностными характеристиками.
Установившийся процесс может быть статическим и вынужденным.
Установившийся процесс, характеризующийся некоторым постоянным значением управляемой величины у, называется статическим. При этом проявляются статические свойства АС, характеризующие равновесное состояние системы при разных по величине, но постоянных во времени входных воздействиях. Статические свойства определяются статическими характеристиками (рис. 1.13). Это зависимость выходной величины у от одной из входных в установившемся статическом процессе при всех других входных величинах, постоянных или равных нулю. Статические характеристики могут быть линейными (а, б) и нелинейными (в, г), однозначными (а, б, в) и двузначными или петлеобразными (г), однотактными (в) и двухтактными (а, г).
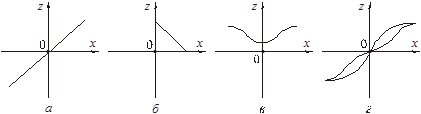
Рисунок 1.13 – Статические характеристики АСУ
| |
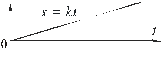
При изменении g по линейному закону (рис. 1.14)
 ,
,
у меняется по тому же закону:

с некоторым отставанием по t.
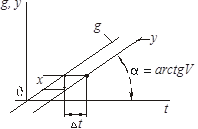
Рисунок 1.14 – Установившийся вынужденный процесс, изменяющийся с постоянной скоростью
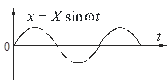
Если g изменяется по гармоническому закону (рис. 1.15)

то и у после переходного процесса будет менятся по тому же закону:

с той же частотой  , но другими амплитудой
, но другими амплитудой  и фазой
и фазой  .
.
Процесс управления складывается из двух составляющих: естественной, или переходной  , и вынужденной
, и вынужденной  :
:
| |

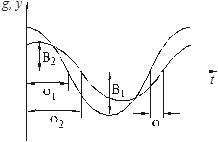
Рисунок 1.15 – Установившийся вынужденный процесс, изменяющийся по гармоническому закону
В частном случае вынужденная составляющая может быть установившейся величиной  .
.
1.4 Основные виды алгоритмов функционирования [3,с.18-22; 4,с.28-30]
Совокупность предписаний, ведущих к правильному выполнению УО своих функций, называется алгоритмом функционирования. Основными видами алгоритмов функционирования являются: стабилизация, программное управление и следящие системы.
Стабилизация. Алгоритм функционирования при стабилизации имеет вид:
 ,
,
т.е. поддерживается заданное постоянное значение регулируемой величины. Осуществляется в системах с замкнутым контуром.
Программное управление. В программном управлении алгоритм функционирования задан и можно построить специальный задатчик программы, вырабатывающий нужное изменение g(t). Это управление может выполняться по разомкнутому или замкнутому контуру или с помощью их комбинации.
Следящие системы. В следящих системах алгоритм функционирования заранее не известен. Обычно управляемая величина должна в этих системах воспроизводить изменение некоторого внешнего фактора, “следить” за ним. Следящую систему можно осуществить по любому принципу управления. От системы программного управления она отличается тем, что вместо задатчика программы устанавливается устройство слежения за изменяющимся внешним фактором.
Кроме указанных алгоритмов функционирования можно выделить ряд таких, как:
- поиска экстремумов некоторых параметров, или функций от параметров процесса, характеризующих качество процессов;
- оптимизации;
-
| |
1.5 Алгоритмы управления. Основные законы управления
[3,с.23-24; 4,с.30-33, 113-118]
Алгоритмом управления называется совокупность предписаний, определяющих характер воздействия на УО с целью выполнения им заданного алгоритма функционирования. Предписаниями для функционирования алгоритма управления могут быть, например, требования к качеству переходного процесса (отсутствия колебаний, длительность переходного процесса, величина ошибки), т.е. заложенный в автоматическое УУ алгоритм управления обеспечивает выполнение алгоритма функционирования с заданным качеством работы АС.
Под законом понимают математическую зависимость, по которой УУ воздействовало бы на УО, если бы оно было безынерционным. “Закон” – это идеализированный алгоритм управления. Фактический алгоритм управления отличается от “закона” за счет динамических искажений в УУ. Но так как в большинстве регуляторов инерционность намного меньше инерционности объекта, то ею можно принебречь и считать, что алгоритм управления близок к “закону”.
Закон регулирования тесно связан с конструкцией регулятора и может быть линейным, нелинейным, непрерывным, импульсным и т.д. Рассмотрим самые распространенные законы, осуществляемые непрерывными линейными регуляторами по отклонению. Эти законы управления характеризуют связь положения ИУ (регулятора) с отклонениями регулируемой величины y.
1.5.1 Пропорциональный закон (П-регулирование)
При пропорциональном регулировании положение регулирующего органа пропорционально выходной величине или ее отклонению:
 .
.
Регулятор, осуществляющий этот закон, называется пропорциональным. Регулирование будет статическим. Постоянная  называется коэффициентом передачи регулятора.
называется коэффициентом передачи регулятора.
Преимущество такого регулирования – быстрота.
Недостаток – принципиальная неточность регулирования, так как невозможно поддерживать желаемую у при изменении f. Ошибка, возникающая при регулировании называется статизмом системы. Статизм регулятора определяется величиной и равен:
| |
 .
.
При регулировании астатического объекта по принципу обратной связи (регулирование по отклонению) статизм системы регулирования  . При регулировании статического объекта:
. При регулировании статического объекта:
 ,
,
где  – статизм объекта, где
– статизм объекта, где  – коэффициент передачи объекта
– коэффициент передачи объекта
по управляющему воздействию.
1.5.2 Интегральный закон (И-регулирование)
Характеризуется тем, что алгоритм управления описывается уравнением:
 или
или 
и в этом случае нет жесткой функциональной связи между g и  АС с УУ И-регулирования всегда является астатической системой по заданному воздействию, т.е. при таком регулировании установившаяся ошибка при постоянном возмущении равна нулю. Следовательно И-регулирование применяется в основном для повышения точности работы АС.
АС с УУ И-регулирования всегда является астатической системой по заданному воздействию, т.е. при таком регулировании установившаяся ошибка при постоянном возмущении равна нулю. Следовательно И-регулирование применяется в основном для повышения точности работы АС.
Недостаток – меньшее быстродействие, чем у П-регулирования.
1.5.3 Пропорционально-интегральный закон (ПИ-регулирование)
При комбинированном ПИ регулировании осуществляется позиционная и интегральная связь между  и
и  :
:
Дата добавления: 2016-02-04; просмотров: 1093;