Управление судном на криволинейном участке пути с помощью РЛС и курсоуказателя.
Скорость движения при р/локационной проводке судна зависит от типа РЛС, интенсивности движения, габаритов пути и характеристик судна. Наибольшие ошибки, вызывающие отклонение судна с оси с.х., возникают при повороте из-за запаздывания радиолокационной информации.
При подходе к криволинейному участку судно выходит в точку поворота с определенной погрешностью, характеризующейся величиной поперечной по отношению с.х. ошибки Δ1. Эта ошибка при глазомерном способе судовождения может быть принята 5-10м, при глазомерно-радиолокационном способе 10-20м. Время начала поворота будет запаздывать при глазомерном методе на величину реакции судоводителя на ориентир, в результате точка начала поворота будет определяться с продольной по отношению с.х. погрешностью пропорциональной скорости и времени ориентировки tор. При глазомерно-р/локационном способе tор = tи+ tр+ tк, где tи – период смены информации на экране РЛС tи =(60/n)k; n – число оборотов антенны РЛС; k – инерция электронно-лучевой трубки =1,2-2,0 оборота антенны; tр – время реакции судоводителя на р/локационный ориентир =1-2с; tк – время передачи команды от штурмана рулевому =1с.
Допустимое уклонение судна определяется ад = 0,75(Вс.х. – ΔВ) – 0,5В где ΔВ – ширина судна в м; В- ширина полосы движения судна с углом дрейфа β0,м
Величина В=Вс + Lsinβ0 где Вс – ширина судна,м; L- длина судна,м; β0- угол дрейфа Ц.Т., град.
Величина β= (45÷70)L/2(R+Δ1) где R –радиус циркуляции или радиус кривизны с.х.
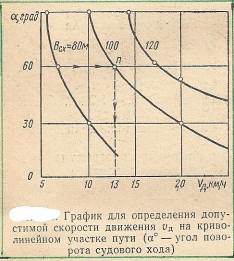
Допускаемая скорость движенияυд =1/tор[√(R – ад)2-R12cos2α –R1sinα], где R1=R+Δ1; α=900.
По этой формуле построен график предельно допустимых скоростей движения при Р/локационной проводке из-за запаздывания радиолокационной информации в зависимости от угла поворота, ширины с.х. для конкретного судна.
,,
Данное ограничение скорости следует учитывать при ширине с.х. до 200м. и углах поворота более 300, при появлении на экране отметки встречного судна, скорость должна быть такой, чтобы тормозной путь судна был равен половине визуальной видимости.
На подходе к повороту судового хода заблаговременно по навигационной карте или визиром измеряют угол поворота с.х. и радиус его кривизны, определяют новый курс, затем перекладывают руль в сторону поворота на такой угол , чтобы радиус циркуляции и радиус кривизны с.х. были примерно равны. Путь судна в правом повороте должен проходить по правой полосе с.х., при левом повороте по оси с.х. На поворотах реки у РЛС с малой частотой информации (частотой вращения антенны) происходит «смазывание» изображения, за счет наложения нескольких изображений одно на другое. Причем чем больше скорость поворота и движения, тем больше «смазывание», что приводит к потере ориентации. Это явление можно уменьшить снижением скорости до подхода к повороту и выполнении поворота по ломаной линии т.е несколькими последовательно меняющимися на 10-150 курсами, между которыми стабилизируя положение судна, для восстановления изображения. При крутых поворотах и ограниченных габаритах с.х. этот прием применять нельзя и при подходе к повороту надо определять точку с ориентиром на траверзе поворота, где выполнять поворот на заранее рассчитанный угол. Судоводитель на непродолжительное время теряет ориентировку, но при выходе на прямолинейный курс восстанавливает ее и вводит поправку в направление движения судна. Ярким примером такого движения является прохождение переката, расхождения в котором при р/локационной проводке не допустимо. ,

В канале за правильностью движения в УОВ по избранному курсу осуществляется по курсовой черте, которая должна находиться по оси канала. Один наблюдатель должен вести постоянное визуальное наблюдение за траверзным расстоянием между бортом судна и откосом канала, при уменьшении которого вводится поправка к курсу. Скорость движения ограничивают в соответствие фактической видимости, с тем чтобы тормозной путь был не более половины визуальной видимости.
Дата добавления: 2016-02-04; просмотров: 2080;