Проводка судна по избранной траектории, учет циркуляции и предотвращение столкновений.
Радиолокационная станция (РЛС) предназначена для обнаружения надводных объектов, определения места судна (ориентировки), элементов движения (курса, скорости), обгоняемых и встречных судов. Радиолокатор можно применять для определения маневренных качеств судна и для обнаружения опасных метеорологических явлений (грозового фронта, снежных зарядов, шквалов и т.п.). Современные РЛС имеют не только функции обзора и измерения, но сочетая функции ЭВМ способны решать ряд задач управления и маневрирования судна и навигации (расчет и выбор скорости, курса, безопасных дистанций и т.п.). Поэтому применение РЛС, помимо плавания при ограниченной видимости (в т.ч. горизонтом) стало нормой при любом движении судна т.к. с ее помощью судоводитель может, помимо улучшения наблюдения, оперативно и с необходимой точностью решать многие задачи управления судном.
На судах внутреннего плавания применяют: морские РЛС ближнего действия (до 50 миль), работающих в сантиметровом диапазоне (3,2 см) и пригодные для радиолокационного и глазомерно – локационного метода; и речные РЛС с меньшей дальностью действия (15-25 км), работающих в миллиметровом диапазоне (0,8мм) и приспособленные для глазомерно-локационного метода. Основными тактическими данными РЛС являются;
- минимальная дальность действия – минимальное расстояние (от антенны) обнаружения объекта;
- максимальная дальность действия – наибольшее расстояние обнаружения объекта (горизонт РЛС);
- разрешающая способность по дальности – минимально различимое расстояние между объектами;
- разрешающая способности по углу – минимально различимый угол между объектами на разных КУ;
- Точность измерения расстояний и пеленгования - определяются величиной ошибки допускаемой при измерении расстояний до объектов и углов на экране РЛС.
Особенностью речных РЛС являются большая разрешающая способность, сравнительно небольшая «мертвая зона» обнаружения объектов и большая частота выдаваемой информации (за счет большей скорости вращения антенны).
Таб 37(О)
Радиолокационное наблюдение ведется на индикаторе кругового обзора, где дается изображение (светоплан) окружающей надводной обстановки, начало развертки в центре экрана совпадает с местом судна, положение ДП отмечается светящейся радиальной линией отметки курса. Для определения направлений используют неподвижную (азимутальный круг) или подвижную (лимб) шкалу и линейки визира. Изображение окружающей местности на индикаторе может быть ориентировано «по курсу» т.е. относительно ДП, или по «норду»т.е. относительно меридиана.
В первом случае, стабилизация по курсу, направления на объекты местности совпадают с направлениями на индикаторе РЛС, что удобно при глазомерно-радиолокационном методе судовождения. Но при повороте судна отметка курса остается неподвижной, а изображение на экране смещается в сторону, обратную повороту, на величину угла поворота. Так как старое изображение исчезает не сразу (послесвечение экрана), при поворотах происходит накладка одного изображения на другое (оно смазывается), в результате чего ориентировка затрудняется, а при больших углах поворота и скорости становится невозможной.
При стабилизации изображения по норду, при повороте судна изображение на экране остается неподвижным, а отметка курса перемещается на угол поворота, направления на объекты, визуально наблюдаемые на местности не совпадают с направлениями видимыми на индикаторе. Этот вид ориентации изображения РЛС удобен при радиолокационном методе судовождения.
Индикаторы РЛС подразделяются на индикаторы относительного движения (ИОД) и истинного движения (ИИД).
На экране ИОД при движении судно остается неподвижным (всегда в центре экрана), а неподвижные объекты перемещаются по экрану в направлении противоположном движению судна (т.е. их перемещение отображает истинное движение судна); перемещение подвижных объектов на экране зависит от скорости и курсов своего судна и объекта (судна). Поэтому определение истинного движения объекта требует геометрических построений.
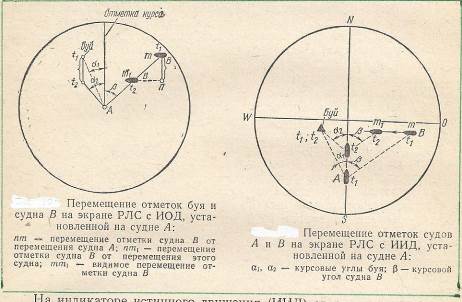
Рис и текст 190,191,192 (о)
При использовании РЛС на участках ВВП с латеральной системой навигационных знаков, применяют глазомерно–радиолокационный способ судовождения, где расхождение или обгон выполняются, как правило на параллельных или противоположных курсах. Поэтому относительное изображение подвижных объектов больше осложняется при определении дистанции между судами. Учитывая эту сложность и «смазывание» изображения при выполнении поворота, расхождение и обгон следует выполнять только на прямолинейных участках. При обнаружении каждой отметки на экране РЛС она должна быть классифицирована как движущееся или неподвижное судно. Направление движения устанавливается непрерывным наблюдением положения отметки относительно отметки неподвижного (берегового) ориентира, любая движущаяся на сближение отметку следует считать встречным судном с которым предстоит расхождение. При наличии нескольких отметок судов, сосредотачивают внимание на ближних и находящихся на острых курсовых углах. Обнаружив встречное судно с ним следует установить р/связь и согласовать взаимные действия по расхождению, исключив ошибку в выборе адресата р/контакта. Расхождение выполняется только левыми бортами, уклоняясь вправо таким образом, чтобы отметка встречного судна находилась слева от курсовой черты, направленной по с.х. При более близком сближении обмениваться звуковыми и визуальными сигналами усилив р/локационное и визуальное наблюдение. При расхождении необходимо удерживать судно на курсе, избегая его рыскливости, соблюдать безопасную траверзную дистанцию, при сближении на которую возможны дополнительные помехи на экране (многократное отражение эхосигналов). Обгон следует производить с особой осторожностью и только после согласования стороны и условий обгона.
Расхождение и обгон в ограниченной видимости при ширине менее с.х. менее 200м – запрещены.
При использовании РЛС на участках ВВП с кардинальной системой ограждения опасностей применяют радиолокационный способ судовождения, стабилизируя изображение индикатора РЛС «по норду», дающее ИИД. В случае маневрирования при ИОД, когда суда идут пересекающимися курсами, необходимо определить курсовой угол на встречное судно, величину и направление изменения пеленга на него (наблюдаются на экране РЛС), ракурс встречного судна и расстояние кратчайшего сближения (графическое построение). Существуют два метода графических построений – истинная и относительная прокладка, последняя используется чаще. Для этого из произвольной точки О прокладывают полученные РЛ-наблюдением пеленги встречного судна П1 и П2 и откладываем по ним соответственно дистанции до встречного судна d1 и d2. Через полученные точки В1 и В2 проводится прямая – линия относительного движения (ЛОД).
Кратчайшее сближение будет равно длине перпендикуляра ОТ, опущенного из точки О на ЛОД.
Величина относительной скорости определяется выражением υот == В1В2/Δt где Δt – промежуток времени между пеленгами П1 и П2.
Время кратчайшего сближения Ткр = В2Т/υот.
Вектор пути встречного (обгоняемого) Šв судна равен геометрической сумме векторов пути своего судна Šн и относительного перемещения Šот: Šв =Šн + Šот . Для нахождения вектора пути встречного судна из точки В2 нужно проложить истинный курс своего судна и на этой линии от точки В2 отложить пройденное своим судном расстояние за время Δt; так получим точку С, отрезок В2С будет вектором Šн. Соединив точку В1 с точкой С, получим вектор Šв, Отрезок В1С будет величиной пройденного за время Δt расстояния встречным (обгоняемым) судном.
Скорость встречного судна υв определяют по формуле υв = В1С / ΔΤ.
Истинным курсом встречного судна ИКв будет угол между меридианом и линией вектора Šв.
Разделив обе части уравнения векторов Š на промежуток времени Δt получим соотношение векторов скоростей ΰв = ΰн + ΰот, где ΰн – вектор скорости своего судна.
Удобно принимать промежуток времени Δt за единицу, тогда отрезки векторов скоростей при построении будут равны перемещениям судов, а треугольник В1В2С будет называться треугольником скоростей, который имеет важное значение в теории и практике судовождения.
Графическую прокладку (в т.ч. при появлении на экране отметок нескольких судов) нужно вести за судами представляющими опасность. Глазомерная оценка производится по следу остающемуся на экране от отметки движущегося судна: если след направлен к центру экрана – существует угроза опасного сближения; если от центра экрана или далеко от него – угрозы столкновения нет (при неизменности курсов судов).
Быстрая оценка конкретной ситуации, наблюдаемой на экране РЛС, позволяет принимать своевременные и правильные решения направленные на предотвращение столкновения судов. Все случаи перемещения эхо-сигналов по ЛОД можно разделить:
- ЛОД параллелен курсу нашего судна, относительная скорость равна сумме скоростей судов, судно – цель следует навстречу, пеленг изменяется к норме – суда разойдутся чисто, левыми бортами;
- ЛОД перемещается по курсовой черте, относительная скорость равна сумме скоростей – суда идут контркурсами – необходимо менять только вправо;
- ЛОД перемещается по курсовой черте, относительная скорость равна разнице скоростей судов, ситуация обгона, суднам следует изменить курсы в противоположные стороны (обгоняющему влево, обгоняемому вправо);
- ЛОД отсутствует, относительная скорость 0, истинные курсы одинаковы – суда идут в одном направлении с одинаковой скоростью. Изменение скорости одного или двух судов приведет к появлению ЛОД – следует сохранять безопасную дистанцию;
- ЛОД не параллельна курсу нашего судна и пересекает его под острым углом – обоим судам необходимо изменить свой курс вправо.
1) Чтобы избежать столкновения со встречным судном, находящимся впереди траверза, нужно изменить курс вправо;
2) чтобы избежать столкновения с судном, следующим кормовым курсовым углом, наше судно должно изменить курс в направлении, противоположном направлению изменения курса другого судна.
Необходимо учитывать, что когда оба судна одновременно поворачивают вправо, желаемого результата можно не достичь, если угол изменения курса вправо первого судна, меньше угла изменения курса вправо другого судна.
Дата добавления: 2016-02-04; просмотров: 3756;