Оценка динамических показателей качества исходной САУ
К динамическим показателям качества относят перерегулирование  и длительность переходного процесса tп, которые определяются из переходной характеристики замкнутой САУ. Для построения данной характеристики в Control System Toolbox применяется функция step, аргументом которой является передаточная функция замкнутой системы
и длительность переходного процесса tп, которые определяются из переходной характеристики замкнутой САУ. Для построения данной характеристики в Control System Toolbox применяется функция step, аргументом которой является передаточная функция замкнутой системы
Ф(s)= 
где W1(s) – передаточная функция прямого канала САУ,
W0(s) – ПФ цепи обратной связи.
Для получения Ф(s) можно воспользоваться функцией feedback (W1,W0). Для рассматриваемого примера имеем W1(s) =W(s), W0(s) =1 и соответственно:
>> F=feedback (W,1)
Transfer function:
1.584
---------------------------------------------------------------------------------------------------
2.88e-005 s^6 + 0.00529 s^5 + 0.08456 s^4 + 0.5012 s^3 + 1.206 s^2 + s + 1.584
Далее можно рассчитать переходную характеристику с помощью функции step:
>> step (F); grid on
В результате получим искомый график, представленный на рис. 6.2. В данном случае получился сходящийся колебательный процесс, что подтверждает устойчивость исходной следящей системы с малым запасом по фазе γ =13°.
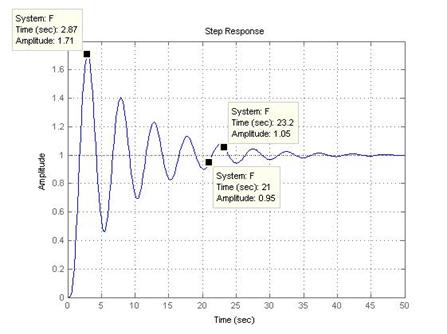
Рис. 6.2. Переходная характеристика замкнутой САУ
Из переходной характеристики с помощью известных в теории автоматического управления способов определяются два основных динамических показателя качества:
· перерегулирование  ,
,
где  ,
,  – соответственно максимальное и установившееся значения выходной координаты;
– соответственно максимальное и установившееся значения выходной координаты;
·  – длительность переходного процесса, которая равна интервалу времени, за который кривая переходной характеристики входит в зону (0,95÷1,05) yуст, в дальнейшем не выходя из неё.
– длительность переходного процесса, которая равна интервалу времени, за который кривая переходной характеристики входит в зону (0,95÷1,05) yуст, в дальнейшем не выходя из неё.
Анализ полученной переходной характеристики (рис. 6.2), показывает, что =70% ,  =23.3 с. Это говорит о неудовлетворительном качестве динамических процессов в следящей системе: перерегулирование в реальных САУ лежит в диапазоне = 10 ÷ 30%, а сравнимо с максимольной постоянной времени контура управления (в нашем случае ТК = 0.5 с).
=23.3 с. Это говорит о неудовлетворительном качестве динамических процессов в следящей системе: перерегулирование в реальных САУ лежит в диапазоне = 10 ÷ 30%, а сравнимо с максимольной постоянной времени контура управления (в нашем случае ТК = 0.5 с).
В заключение по результатам анализа исходной САУ делается общий вывод. Практически во всех случаях систему требуется корректировать. Во-первых, если система обладает заданной точностью, то она, как правило, неустойчива или имеет малый запас устойчивости. В последнем случае динамические показатели качества также получаются не совсем приемлемыми (значительная колебательность, большая величина перерегулирования ). Во-вторых, если САУ имеет низкую точность, то система обычно устойчива, но качество динамики САУ оставляет желать лучшего – при приемлемом получается очень большое время .
Дата добавления: 2016-01-26; просмотров: 1308;