КОРРЕКЦИЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Динамические показатели качества в значительной мере определяются инерционными свойствами звеньев САУ. К таким звеньям в рассматриваемом примере относятся ЭМУ, Г и Д, передаточные функции которых имеют довольно существенные значения основных постоянных времени.
Точность работы САУ также зависит от возмущающих воздействий, действующих на объект управления и силовые преобразователи. К таковым в рассматриваемом следящем электроприводе можно отнести колебания напряжения промышленной сети, вследствие чего изменяется скорость приводных двигателей, и изменения моментов сопротивления на валу двигателя.
Для уменьшения влияния инерционности и возмущений в САУ вводят местные обратные связи. Для расчета этих дополнительных контуров управления целесообразно использовать методику последовательной коррекции с подчиненным регулированием координат.
В используемой в качестве примера САУ можно ввести два внутренних вложенных друг в друга контура регулирования: один по напряжению генератора, второй по скорости электродвигателя. Организация этих обратных связей представлена на рис. 7.1.
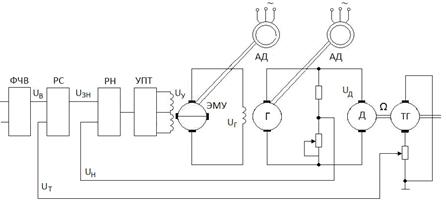
Рис. 7.1. Реализация подчиненного регулирования
В данной схеме регулятор напряжения РН и регулятор скорости РС помещены между ФЧВ и УПТ, т.к. коррекцию удобнее реализовать на постоянном токе в слаботочной части прямого канала управления.
Здесь датчиком внутреннего контура является делитель напряжения, с которого часть напряжения  подается на вычитающий вход РН. В качестве датчика скорости используется тахогенератор ТГ (со своим делителем напряжения), напряжение с которого поступает на вычитающий вход РС. Далее рассматривается методика последовательной коррекции с подчиненным регулированием координат для синтеза РН и РС.
подается на вычитающий вход РН. В качестве датчика скорости используется тахогенератор ТГ (со своим делителем напряжения), напряжение с которого поступает на вычитающий вход РС. Далее рассматривается методика последовательной коррекции с подчиненным регулированием координат для синтеза РН и РС.
Дата добавления: 2016-01-26; просмотров: 720;