Замкнутая система с суммированием сигналов
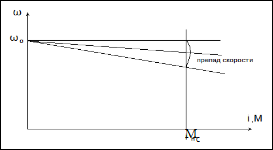
Разомкнутые системы привода обладают существенным недостатком - их статические характеристики мягкие, с большим наклоном. При колебаниях нагрузки меняется скорость двигателя.
Назначения замкнутой системы:
· выполнение требуемой диаграммы скорости, ускорения, момента с заданным быстродействием;
· стабилизация скорости;
· увеличение диапазона регулирования за счет повышения жёсткости характеристик;
· защита от перегрузок.
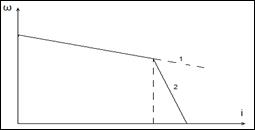
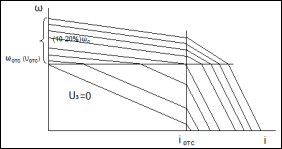
Обычная характеристика имеет вид (1). Если машина наткнётся на препятствие, то увеличится ток выше допустимого, чтобы машина не сгорела нужна характеристика (2). До какого-то значения ic необходима жесткая характеристика. С увеличением нагрузки характеристика становится мягкой (крутопадающей). Характеристика такого типа называется экскаваторной. Характеристика АД не может заменить экскаваторную.

Обратные связи бывают:
· положительные, отрицательные;
· жёсткие, гибкие;
СТРУКТУРНЫЕ СХЕМЫ ЗАМКНУТЫХ СИСТЕМ
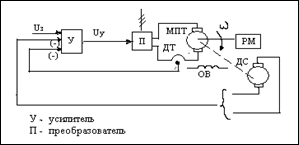
В систему с суммированием сигналов заводятся две обратные связи – главная (по скорости) и внутренняя (с датчика тока).
Система с тремя регуляторами имеет вид (система с параллельной коррекцией).
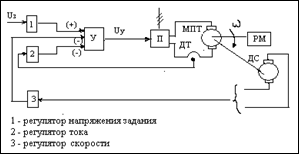
Можно регуляторы включить последовательно (система с последовательной коррекцией), т.е. система подчинённого регулирования.

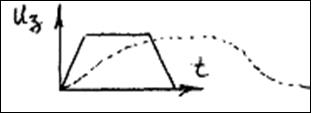
Если сигнал задания меняется по трапециидальному закону, то разомкнутая система электропривода отрабатывает его с запаздыванием и статической ошибкой.
ЗАМКНУТАЯ СИСТЕМА ПРИВОДА ПОСТОЯННОГО ТОКА С СУММИРОВАНИЕМ СИГНАЛОВ И ЗАДЕРЖАННЫМИ ОБРАТНЫМИ СВЯЗЯМИ ПО ТОКУ И СКОРОСТИ
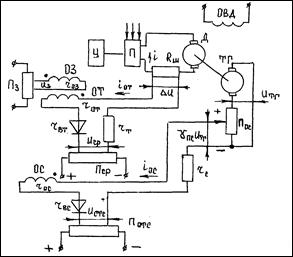
γпс – коэффициент передачи потенциометра Пос ;
rc, rт – сопротивления наладочного характера;
Пср- потенциометр сравнения;
Пз- потенциометр задания;
rвс, rвт – сопротивления вентилей;
Uотс – напряжение отсечки;
Потс – потенциометр отсечки;
ОТ – обратная связь по току;
ОС – обратная связь по скорости;
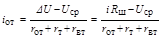
Узел обратной связи по току
 ;
;  ;
;
 .
.

Когда ток двигателя i равен нулю, то iот <0 (мог бы быть), но вентиль ток не пропускает в обратном направлении. Эта формула будет справедлива, когда ΔU ≥Uср , т.е. i ≥ iотс
 ;
;  .;
.;
Пока i< iотс , тока iот в цепи обратной связи не будет
 .
.
Меняя Uср , меняется iотс .
Если Uср=0 , то iотс=0, и по токовой обмотке будет всё время идти ток.
Цепь обратной связи по скорости
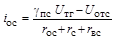 .
.
Если пренебречь внутренним падением напряжения в тахогенераторе, т.е.
 ,
,
то
 .
.
Обозначим γпс kтг через γс – коэффициент передачи от скорости к напряжению в узле ОС по скорости.
 .
.
Пока γс ω > Uотс , тока іос нет.
Для системы Г-Д
 .
.
Для системы ТП-Д
 .
.
Для систем АВК и ВД постоянного тока
 .
.
Результирующие ампервитки
 ;
;
 ;
;
 ;
;
 ;
;
где:  ;
;  ;
;  .
.
Тогда
 .
.
Умножим левую и правую часть на  :
:

Обозначим:  ;
;
 ;
;
 .
.
Тогда
 .
.
Статическая характеристика
 ;
;  ;
;  ;
;
 .
.
Статическая характеристика может быть разбита на 3 участка, которым соответствуют 3 режима работы.
1. і < іотс ; ω > ωотс ; βт = 0; βс ≠ 0;
 .
.
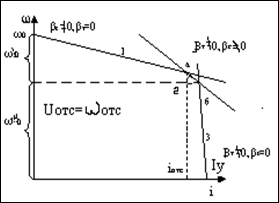
Скорость идеального холостого хода
Первое слагаемое ω'0 определяется напряжением задания Uз. Второе слагаемое ω'’0 определяется Uотс.
Статический перепад скорости
 ;
;  .
.
Отрицательная обратная связь по скорости дает увеличение жесткости характеристики.
Если ток достигает значения тока отсечки, то действуют обе обратные связи.
2. і > іотс ; ω > ωотс ; βт ≠ 0; βс ≠ 0;
 .
.
Статическая характеристика мягче
 .
.
Этот режим будет продолжаться до тех пор, пока скорость не станет равна скорости отсечки.
3. і > іотс ; ω < ωотс ; βт ≠ 0; βс = 0
 ;
;
 .
.
Ток упора Iу определяется из выражения
 .
.
РЕГУЛИРОВАНИЕ СКОРОСТИ В ЗАМКНУТОЙ СИСТЕМЕ
Для регулирования скорости можно изменять Uз, іотс и Uотс.
1. Меняем Uз. При уменьшении Uз характеристика проходит ниже. Скорость меняется в малых пределах.
2. Меняем Uотс. При уменьшении Uотс скорость ω”о уменьшается, ω’о остается постоянной.
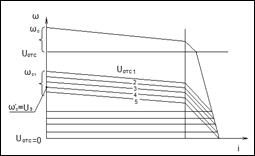
3. Меняем ток отсечки іотс.
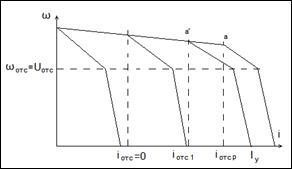
При одновременном изменении іотс и Uотс можно регулировать скорость по любому закону.
Системы с двумя отсечками применяются относительно мало. Есть системы с совмещенными отсечками.

Имеем характеристику (1). Меняя Uз, получаем (2).
Дата добавления: 2016-01-07; просмотров: 1237;