Системы подчиненного регулирования (СПР)
Система последовательного действия содержит меньше элементов, простая и удобная в настройке. Особенностью системы последовательного действия является подчиненное регулирование основных параметров электропривода.
Число последовательно включенных регуляторов равно числу регулируемых параметров. На вход каждого регулятора подаются сигналы заданного и действительного значений регулируемого параметра, причем предыдущий регулятор вырабатывает сигнал задания для последующего. В системе легко вводятся ограничения.
ОБОБЩЕННАЯ СТРУКТУРНАЯ СХЕМА СПР
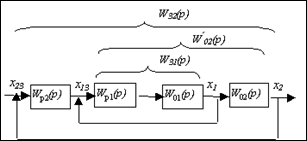
В соответствии со схемой передаточная функция (ПФ) объекта регулирования, например, второго контура запишется в виде
 ,
,
где W02(p) - передаточная функция собственно объекта 2го контура; W01(р) - передаточная функция объекта 1го контура; Wp1(p) - ПФ регулятора 1го контура; W31(р) - ПФ замкнутого первого контура.
В рассмотренной системе контур регулирования наждого параметра (координаты) содержит только одну "большую" постоянную времени, компенсируемую действием регулятора, что значительно облегчает синтез системы и позволяет применять однотипные регулирующие элементы.
Расчёт параметров СПР производится путём последовательной оптимизации отдельных контуров. Под оптимизацией понимается приведение передаточной функции замкнутого контура в соответствие с поставленными требованиями (быстродействие, перерегулирования и т.д).
ПФ объекта оптимизированного контура при определённых рассматриваемых ниже допущениях может быть сведена к виду
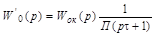 ,
,
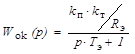
где Woк(р) - ПФ звеньев, действие которых компенсируется регулятором. Второй сомножитель представляет собой произведения ПФ апериодических звеньев, компенсация действия которых для данных условий нецелесообразна. Обычно постоянные времени τ малы по сравнению с постоянными времени входящими в сомножитель Woк(p). Поэтому не компенсируемые постоянные называются малыми, а компенсируемые - большими. Оптимизация в данном случае сводится к замене разомкнутой цепи с большой постоянной времени замкнутым контуром, описываем дифференциальным уравнением того же порядка, но с меньшей постоянной.
Передаточная функция и регулятора
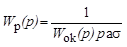 ,
,
где ∑τ = σ– сумма малых постоянных времени; а – коэффициент демпфирования контура.
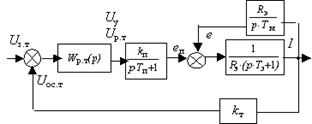
КОНТУР РЕГУЛИРОВАНИЯ ТОКА
Структурная схема замкнутого контура регулирования тока якоря ДПТ
Структурная схема разомкнутой цепи
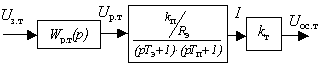
 ,
,
где:  ; а = ат = 2 .
; а = ат = 2 .
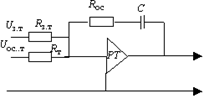
Передаточная функция пропорционально – интегрального регулятора тока (ПИ-регулятора)
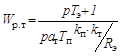 .
.
Структурная схема разомкнутой цепи регулирования с ПФ регулятора
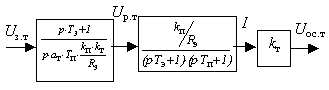
Схема ПИ - регулятора тока

Передаточная функция разомкнутого контура
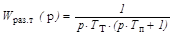 ,
,
где: Тт = атТп – постоянная времени интегрирования контура тока.
Постоянная времени интегрирования регулятора
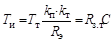 .
.
Постоянная времени обратной связи регулятора
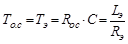 .
.
Передаточный коэффициент ОС по току
где kд.т =kш·kу - передаточный коэффициент измерителя тока, в/а; kш - коэффициент передачи шунта, в/а; kу - коэффициент усиления датчика тока.
Передаточная функция замкнутого контура регулирования тока имеет вид
 .
.
КОНТУР РЕГУЛИРОВАНИЯ СКОРОСТИ
Регулятор контура скорости имеет пропорциональную либо пропорционально-интегральную характеристику, т.е. однократно- или двукратноинтегрирующая система. Они обладают астатизмом 1-го или 2-го порядка.
Дата добавления: 2016-01-07; просмотров: 1092;