Структурная схема разомкнутого контура регулирования скорости
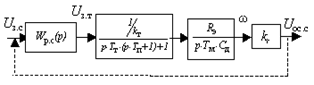
Обозначим σ = Тт ; 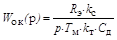 ; а = ас.
; а = ас.
ПФ пропорционального регулятора скорости (П – регулятора)
 .
.
Структурная схема разомкнутого оптимизированного контура скорости
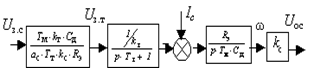
ПФ разомкнутого контура
 .
.
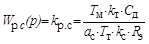
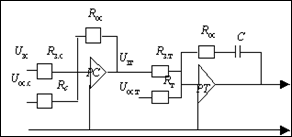
Схема пропорционального регулятора скорости
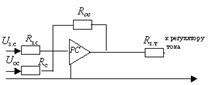

Передаточная функция регулятора
 .
.
Передаточный коэффициент ОС по скорости
 ,
,
где kдс- передаточный коэффициент датчика скорости, В/об/мин.
Постоянная времени интегрирования контура скорости
 .
.
Передаточная функция замкнутой системы регулирования скорости
 .
.
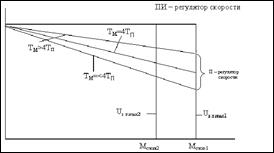
Графики изменения скорости во времени в зависимости от коэффициента демпфирования представлены на рисунке
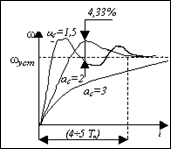
Схема регуляторов.
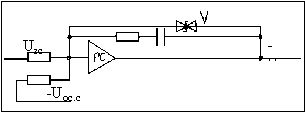
СТРУКТУРНАЯ СХЕМА ДВУХКОНТУРНОЙ ОДНОКРАТНОИНТЕГРИРУЮЩЕЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ СКОРОСТИ (ТП-ДПТ)
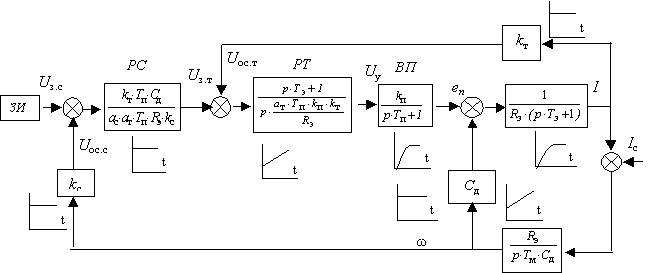
Если на вход П - или ПИ - регулятора скорости подать задающий сигнал Uзс скачком, то угловая скорость установится за указанное время и с указанным перерегулированием, но при отсутствии каких-либо ограничений на значение тока якоря, ЭДС выпрямителя, на ускорения механизмов и т.п. Практически ток якоря при этом превзойдет допустимое значение, поэтому должно быть предусмотрено ограничение тока. В системе подчинённого регулирования оно выполняется просто - для этого нужно ограничить максимальный уровень сигнала задания тока Uзт т.е., сигнала на выходе регулятора скорости. Ограничение этого сигнала достигается установкой в цепь обратной связи усилителя скорости стабилитронов V.
При такой схеме ограничения тока и изменения Uзс скачком регулятор скорости сразу входит в ограничение, т.е. устанавливается скачком Uзтmax,соответствующее допустимому току якоря. Контур тока отрабатывает это задание за время t = 4,7· TП с перерегулированием 4,33% и привод разгоняется с постоянным значением тока. Ускорение привода будет зависить от момента инерции и момента статической нагрузки. По достижении заданной угловой скорости за счёт сигнала обратной связи по скорости регулятор выйдет из зоны ограничения и будет уменьшать Uзт до уровня, определяемого нагрузкой.
При перегрузке или стопорении привода резкое снижение угловой скорости, т.е. сигнала ООС по скорости, также вводит регулятор скорости в зону ограничения, и привод работает с постоянным допустимым моментом. Изменяя уровень ограничения Uзт, можно изменять значение этого момента.
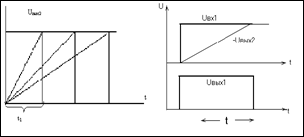
Механические характеристики двигателя в системе подчинённого регулирования. Ограничение тока двигателя при пусках и торможениях в системах подчинённого регулирования обычно достигается не ограничением выходного сигнала регулятора скорости ( ограничение сохраняется как средство защиты), а применением задатчика интенсивности (ЗИ), посредством которого сигнал задания скорости изменяется не скачком, а линейно во времени до требуемого уровня. Ток якоря при этом устанавливается и спадает в конце пуска или торможения по оптимальному закону, а угловая скорость привода, при Mс = const изменяется по линейному закону, следуя за сигналом задатчика.
Основным достоинством применения ЗИ является независимость значения ускорения привода от статического момента.
Функциональная схема ЗИ с временем отработки до 20 сек.
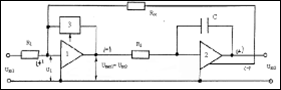
Первый усилитель работает в режиме регулируемого ограничения. Его выходное напряжение интегрируется во времени с помощью второго усилителя с парафазным выходом
 ,
,
где: 
 - постоянная интегрирования.
- постоянная интегрирования.
Время интегрирования t для номинального значения выходного напряжения  может регулироваться изменением входного сигнал
может регулироваться изменением входного сигнал  или постоянной времени T.
или постоянной времени T.
В схеме используются оба этих способа. Ступенчатое изменение времени интегрирования осуществляется коммутацией части сопротивления  , а плавная регулировка производится воздейсвтием на узел ограничения 3, определяющий предельную величину выходного напряжения первого усилителя.
, а плавная регулировка производится воздейсвтием на узел ограничения 3, определяющий предельную величину выходного напряжения первого усилителя.
Вся система охватывается жёсткой отрицательной ОС с коэффициентом передачи, равным 1( R1 = Rос). В результате выходное напряжение интегратора в процессе отработки устанавливается равным напряжению задания  .
.
Пока выходное напряжение не достигло уровня напряжения  жёсткая обратная связь блокирована и первый усилитель имеет на выходе напряжение, определяемое узлом ограничения 3 и не зависящее от величины входного сигнала . В тот момент, когда напряжения и сравниваются по величине, выходное напряжение первого усилителя резко уменьшается практически до 0 и процесс интегрирования на этом прекращается.
жёсткая обратная связь блокирована и первый усилитель имеет на выходе напряжение, определяемое узлом ограничения 3 и не зависящее от величины входного сигнала . В тот момент, когда напряжения и сравниваются по величине, выходное напряжение первого усилителя резко уменьшается практически до 0 и процесс интегрирования на этом прекращается.
Один из главных недостатков систем подчинённого регулирования - это уменьшение быстродействия системы примерно в 2m-1 раз по мере роста числа последовательных контуров; m - номер контура. Поэтому используется число последовательных контуров не более трех-четырёх.
Системы подчинённого регулирования широко примененяются не только в приводах постоянного тока, но и в приводах переменного тока.
УНИФИЦИРОВАННАЯ БЛОЧНАЯ СИСТЕМА РЕГУЛЯТОРОВ (УБСР)
Основные задачи управления электроприводами могут быть решены с помощью относительно небольшого набора командных устройств, датчиков и регулирующих устройств. Законы регулирования - пропорциональный (П), интегральный (И), пропорционально-интегральный (ПИ) и др. могут быть реализованы применением однотипных усилителей постоянного тока с различными связями и цепями на входе. С помощью функциональных преобразователей можно выполнить операции умножения, деления, введения различного рода нелинейностей. Датчики, помимо измерения параметров, обеспечивают разделение потенцналов измеряемой и входной величин. Система выполняется в виде блочной конструкции, включающей в себя отдельные функциональные модули, которые могут набираться в любых комбинациях в шкафах.
Структурная схема операционного усилителя (ОУ)
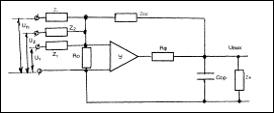
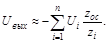
z1, z2,…,zn входные сопротивления; zос – сопротивление обратной связи; Rф, Сф – сопротивление и емкость фильтра; zн – входное сопротивление нагрузки; y – операционный усилитель. Выходное напряжение ОУ
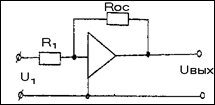
Схемы регуляторов:
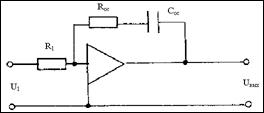
пропорциональный П
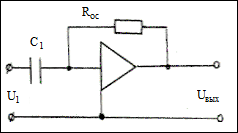
интегральный И
 ,
,
где 
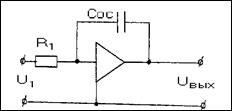
дифференциальный Д
 ,
,
где 
интегрально-пропорциональный ИП
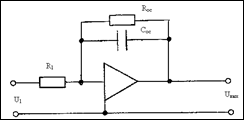


пропорционально-интегральный ПИ
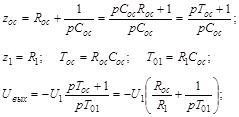
пропорционально-интегрально-дифференциальный ПИД
Дата добавления: 2016-01-07; просмотров: 2499;