Связь потока с потокосцеплением
 ;
;  ,
,
где р – число пар полюсов; N – число проводников в пазу; а – число пар параллельных ветвей; k – конструктивный коэффициент двигателя.
Передаточная функция 3-го звена
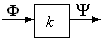
 .
.
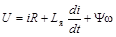
4. Дифференциальное уравнение якорной цепи двигателя
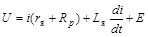 ,
,
где  – противо-ЭДС двигателя;
– противо-ЭДС двигателя;  .
.
Тогда
Разделим обе части уравнения на R
 ,
,
где:  - электромагнитная постоянная времени якорной цепи.
- электромагнитная постоянная времени якорной цепи.
Запишем уравнение в операторной форме
 .
.
Определим передаточную функцию четвертого звена
 .
.
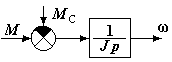
5. Уравнение движения привода
 .
.
Определим передаточную функцию
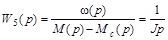 ,
,
где:  .
.
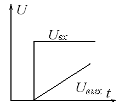
Интегрирующее звено имеет характеристику
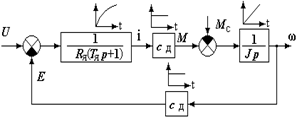
СТРУКТУРНО–ЛОГИЧЕСКАЯ СХЕМА ДПТ
 При постоянном потоке возбуждения Ф = const;
При постоянном потоке возбуждения Ф = const;  , где: сД- постоянная двигателя.
, где: сД- постоянная двигателя.
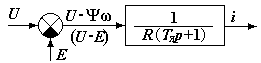
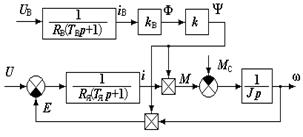
СТРУКТУРНАЯ СХЕМА ДПТ
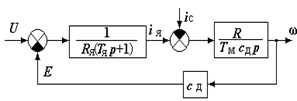
Структурные схемы позволяют анализировать электромеханические процессы происходящие в двигателе.
ОБЩЕЕ ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ можно составить из следующих дифференциальных уравнений:
 ; (1)
; (1)
 ; (2)
; (2)
Разделив обе части уравнения на сД, получим уравнение тока двигателя
 . (3)
. (3)
Дата добавления: 2016-01-07; просмотров: 956;