Тенденции развития современного електропривода
Основная масса промышленных преобразователей энергии строится по схеме трехфазный выпрямитель – трехфазный автономный инвертор напряжения. Требования к влиянию потребителя на питающую сеть постоянно ожесточаются, вводимые стандарты предполагают использование простых выпрямительных схем на входе преобразователя (стандарты IEEE-519, МЭК 555, ГОСТ 13109). Для улучшения качества энергопотребления, повышения коэффициента мощности, снижение установленной мощности и стоимости преобразователя применяют выпрямители на неуправляемых ключах, системы стабилизации напряжения звена постоянного тока, схемы с дополнительной индуктивностью и дополнительным ключом для высокочастотного импульсного регулирования входного тока. Силовая схема при этом обладает встроенным «интеллектом» (SMART технология). В преобразователях энергии используются современные силовые приборы (IGBT,IGCT), имеющие весьма малые динамические потери. Характерным режимом использования силового преобразователя становится режим высокочастотной широтно-импульсной модуляции ШИМ. Частота ШИМ 10-20кГц может оказаться вполне не лишней при повышении частоты питания новых разрабатываемых электродвигателей.
Перспективны непосредственные преобразователи частоты на полностью управляемых силовых ключах (матричные преобразователи), при этом исключаются дополнительные реактивные элементы в основной силовой схеме (как индуктивности, так и конденсаторы). Матричный преобразователь позволяет одновременно синтезировать требуемое для питания двигателя выходное напряжение (ток) и обеспечить желаемый характер энергопотребления от питающей сети (вплоть до опережающего cosj).
В качестве первичных измерителей используются серийно выпускаемые датчики тока и напряжения, датчики положения Холла, тахогенераторы, фотоимпульсные датчики перемещения и кодовые датчики положения, синусно-косинусные вращающиеся трансформаторы и индуктосины с цифровым съемом информации. Объем использования новых типов датчиков (пьезоэлектрических, емкостных, лазерных и других) весьма мал. Одна из причин стабилизации в области разработок первичных измерителей кроется в использовании новых принципов обработки результатов измерений – имеются в виду системы косвенного измерения. За счет их применения оказалось возможным решить задачи современного этапа, а в ряде случаев даже уменьшить количество датчиков (например отказаться от применения датчика частоты вращения в следящем приводе) или совсем исключить датчики механического движения («бездатчиковые» электроприводы).
Задачи управления электроприводом заключаются в обеспечении требуемой частоты вращения (общепромышленный регулируемый привод), а также в регулировании электромагнитного момента, мощности, ускорения, положения ротора или технологического параметра, определяемого этими переменными. Различают задачи стабилизации, слежения, позиционирования обеспечения инвариантности (независимости или слабой зависимости от действия неконтролируемых возмущений), автономности (независимости поведения отдельной части или отдельной переменной объекта от остальных), оптимального (в смысле выбранного критерия) управления.
Специфика, вытекающая из выбора того или иного типа двигателя переменного тока состоит в управлении двумя подсистемами: системой переменных механического движения и системой электромагнитных переменных – реактивным током, потокосцеплением и т.д. Обычно задача управления переменными последней подсистемы не задается явными требованиями к электроприводу, а определяется из дополнительных требований: минимизации энергетических потерь, обеспечение необходимых ресурсов управления и т.д., при условии решения основной задачи управления механическим движением. Управляющими воздействиями являются компоненты напряжений (токов). Несмотря на преимущества векторного управления, продолжается использование более простых систем привода, в которых управление указанными двумя подсистемами заранее связано какой либо зависимостью, например U/f=const. Эти системы хорошо отработаны и, по всей видимости, будут использоваться и в дальнейшем в разомкнутых системах привода с цифровым управлением, хотя и для последних начали применять векторные электропривода.
Анализ продукции ведущих мировых производителей систем привода и материалов опубликованных научных исследований в этой области позволяет отметить следующие тенденции развития электропривода.
· Неуклонно снижается доля систем привода с двигателями постоянного тока и увеличивается доля систем привода с двигателями переменного тока. Это связано с низкой надёжностью механического коллектора и более высокой стоимостью коллекторных двигателей постоянного тока по сравнению с двигателями переменного тока. По прогнозам специалистов в начале следующего века на Европейском рынке из общего числа продаваемых регулируемых приводов электроприводы переменного тока составят 68%, а электроприводы постоянного тока составят только 15%. Остальная доля приходится на механические и гидравлические приводы.
· Преимущественное применение в настоящее время имеют приводы с короткозамкнутыми асинхронными двигателями. Большинство таких приводов (около 80%) – нерегулируемые. В связи с резким удешевлением статических преобразователей частоты доля частотно – регулируемых асинхронных электроприводов быстро увеличивается.
· Естественной альтернативой коллекторным электроприводам постоянного тока являются приводы с вентильными (электронно–коммутируемыми) двигателями. Преимущественное применение получили синхронные двигатели с возбуждением от постоянных магнитов или с электромагнитным возбуждением (для больших мощностей). Этот тип привода наиболее перспективен для глубокорегулируемых приводов, однако, является самым дорогостоящим. Некоторого снижения стоимости можно добиться при использовании синхронного реактивного двигателя.
· Приводом XXI века по прогнозам большинства специалистов, станет привод на основе вентильно–индукторного двигателя ВИД. Двигатели этого типа просты в изготовлении, технологичны и дешевы. Они имеют пассивный ферромагнитный ротор без каких либо обмоток или магнитов. Вместе с тем, высокие потребительские свойства привода могут быть обеспечены только при применении мощной микропроцессорной системы управления в сочетании с современной силовой запираемой электроникой. Для типовых применений перспективны индукторные двигатели с самовозбуждением, а для тяговых приводов – индукторные двигатели с независимым возбуждением со стороны статора. В последнем случае появляется возможность двухзонного регулирования скорости по аналогии с обычными приводами постоянного тока.
· Для большинства массовых применений привода (насосы, вентиляторы, конвейеры, компрессоры и т.д.) требуется относительно небольшой диапазон регулирования скорости (до 1:10) и относительно низкое быстродействие. При этом целесообразно использовать частотно-регулируемый асинхронный привод с классической структурой скалярного управления. Переход к широко диапазонным (до 1:10000), быстродействующим приводам станков, роботов и транспортных средств, требует применения более сложных структур векторного управления. Доля таких приводов составляет сейчас около 5% от общего числа и постоянно растёт.
· В последнее время на базе систем векторного управления разработан ряд приводов с прямым цифровым управлением моментом. Отличительной особенностью этих решений является предельно высокое быстродействие контуров тока, реализованных на базе цифровых релейных регуляторов, или регуляторов, работающих на принципах нечёткой логики (фаззи–логики). Системы прямого цифрового управления моментом ориентированы в первую очередь на транспорт, на использование в подъемных машинах и кранах, лифтах, робототехнике.
· Усложнение структур управления приводами потребовало резкого увеличения производительности центрального процессора и перехода к специализированным процессорам с объектно – ориентированной системой команд, адаптированной к решению задач цифрового регулирования в реальном времени. Ряд фирм (Intel, Texas instruments, Analog devices и др.) выпустили на рынок новые микроконтроллеры для управления двигателями (из серии Motor Control) на базе процессоров по обработке сигналов – DSP – микроконтроллеры. Они обеспечивают требуемую производительность центрального процессора (более 20 млн.оп./сек.), и содержат ряд встроенных периферийных устройств, предназначенных для оптимального сопряжения контроллера с инверторами и датчиками обратных связей. Среди встроенной периферии особое место занимают универсальные генераторы периодических сигналов, обеспечивающие самые современные алгоритмы управления инверторами, в частности, алгоритмы векторной широтно – импульсной модуляции.
· Рост вычислительных возможностей встроенных систем управления приводами сопровождается расширением их функции. Кроме прямого цифрового управления силовым преобразователем различаются дополнительные функции поддержки интерфейса с пользователем (через пульт оперативного управления), а также управления технологическим процессом. Рисунок демонстрирует дополнительные возможности современных систем управления преобразователями частоты для приводов насосов.
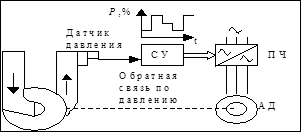
В состав системы управления входят: универсальный регулятор технологической переменной, а также генератор управляющих воздействий на базе часов реального времени. Такое решение позволяет поддерживать давление в трубопроводе на заданном, в соответствии с суточной циклограммой, уровне исключительно средствами электропривода, без использования промконтроллеров.
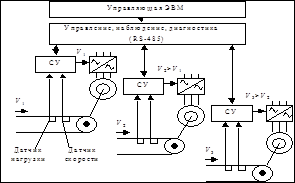
· Перспективные системы управления электроприводами разрабатываются с ориентацией на комплексную автоматизацию технологических процессов и согласованную работу нескольких приводов в составе промышленной сети. Управление сетью берет на себя промконтроллер или управляющая ЭВМ.
Наиболее перспективные типы интерфейсов: RS – 485 и CAN. CAN – интерфейс постепенно становится стандартом для распределенных систем управления на электрическом транспорте и робототехнике.
· Стремление предельно удешевить привод, особенно в массовых применениях в бытовой технике (пылесосы, стиральные машины, холодильники, кондиционеры, и т.д.) привело к отказу от датчиков механических переменных и переходу к системам бездатчикового управления. В этих системах для оценки механических координат привода (положения, скорости, ускорения) используются специальные цифровые наблюдатели. Последнее возможно только при высокой производительности центрального процессора, когда система дифференциальных уравнений, описывающих поведение привода, может быть решена в реальном времени.
· Возросшие возможности микропроцессорной техники привели к тому, что при массовом производстве изделий с объемом выпуска не менее 10000 штук в год, оказывается возможным и экономически целесообразным создание мощных, однокристальных систем управления приводами на базе DSР – микроконтроллеров. Их стоимость при ограниченных интерфейсных функциях не будет превышать 10 – 20 дол. США.
Основные затраты при разработке систем управления приводами приходятся не на создание аппаратной части, а на разработку алгоритмического и программного обеспечения..
Дата добавления: 2016-01-07; просмотров: 1564;