Вентильный двигатель (ВД)

Одним из наиболее перспективных и универсальных типов электроприводов с синхронными машинами является бесколлекторный или бесконтактный вентильный двигатель, в котором регулирование скорости и момента осуществляется подводимым напряжением, током возбуждения и углом опережения включения вентилей при самоуправлении по частоте питания. Он обладает регулировочными качествами машин постоянного тока и надёжностью систем переменного тока.
Надежность обычного СД выше надежности любой другой машины, а по стоимости она уступает только асинхронной с короткозамкнутым ротором. Бесконтактность СД обеспечивается как обычным способом (с помощью бесщеточных систем возбуждения с вращающимися выпрямителями), так и новыми (применением постоянных магнитов на роторе, когтеобразного ротора и обмотки возбуждения на статоре и т.д.).
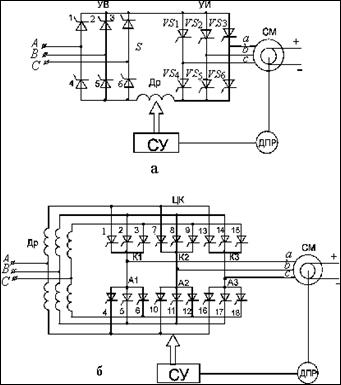
Ввиду простоты наибольшее распространение получили вентильные двигатели постоянного (а) и переменного тока (б) с преобразователями, работающими в режиме источника тока.
В отличие от частотно-регулируемого привода, в вентильном двигателе коммутация тиристоров осуществляется за счет ЭДС двигателя (машинная). Машинная коммутация позволяет отказаться от высоковольтных громоздких реактивных элементов в инверторе. Это значительно упрощает схему и уменьшает ее габаритную мощность, и в конечном итоге улучшает качество преобразования энергии. Но при пуске и низких скоростях происходит срыв коммутации из-за отсутствия или малой величины ЭДС. В вентильном двигателе постоянного тока возможны следующие способы пуска:
· асинхронный;
· с искусственной коммутацией;
· с принудительной коммутацией.
Первый способ при своей кажущейся простоте имеет серьезные недостатки - пуск неуправляемый и необходимы переключения в силовых, как правило, высоковольтных цепях.
Второй способ пуска предусматривает применение автономного инвертора, в котором используется реактивная энергия коммутирующих элементов (емкостей и дросселей). В этом случае заметно усложняется схема, увеличиваются вес и стоимость инвертора.
Третий способ пуска с принудительной коммутацией осуществляется отсечкой управляющих импульсов или цикличным переводом выпрямителя в инверторный режим на время коммутации тиристоров инвертора. Этот способ требует минимальных затрат. Характерными недостатками являются уменьшение пускового момента двигателя и некоторое увеличение потребляемой реактивной мощности.
Пуск с принудительной коммутацией выполняется также в схеме с неуправляемым выпрямителем. Инвертор в этом случае осуществляет широтно-импульсное регулирование напряжения. Этот способ требует применения в инверторе транзисторов или запираемых тиристоров.
Наиболее просто проблема пуска решается в системе с циклоконвертором (б), в которой функции выпрямления и инвертирования выполняют одни и те же тиристоры, чем достигается преобразование напряжения и частоты источника непосредственно в напряжение и частоту двигателя. Такая система содержит большее число тиристоров, чем преобразователь со звеном постоянного тока, но благодаря отсутствию пусковых устройств, однократному преобразованию энергии и уменьшению теплового тока тиристора она экономична и надежна.
В схеме с циклоконвертором естественная коммутация осуществляется во всем скоростном диапазоне работы ВД как между тиристорами в работающих группах, так и между тиристорами однополярных групп. Последнее происходит при совпадении во времени сигналов на переключение фаз сети и двигателя. Машинная коммутация выполняется за счет ЭДС двигателя между тиристорами однополярных групп при частотах выше 0,1...0,15 частоты вращения двигателя.

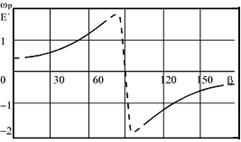
Реверсирование ВД осуществляется просто и возможно двумя путями:
· увеличение угла опережения больше 900;
· реверсированием двух фаз сигналов с ДПР.
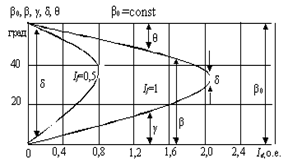
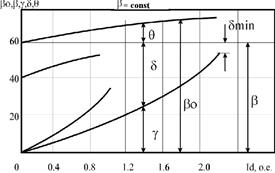
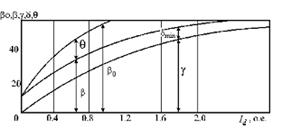
Полоса пропускания коммутатора ВД регулируется изменением угла опережения b0 или b (углы между током и соответственно ЭДС холостого хода и напряжением машины). Существуют следующие способы управления коммутатором ВД:
· b0=const;
· b=const;
· b0=b0min=f(g, q) при d=dmin=const;
· b=bmin=f(g) при d=dmin=const,
где b0=b+q; q — угол нагрузки синхронной машины; b=g+d; g — угол коммутации (учитывает коммутационное перекрытие фаз); d — угол запаса (учитывает погрешность системы управления и время восстановления запирающих свойств тиристоров).
При способе управления b=const угол опережения остается постоянным во всех режимах работы привода и рассчитывается в соответствии с максимальной величиной нагрузки. При этом току холостого хода соответствует наибольшее значение угла запаса (40...50°), хотя для восстановления запирающих свойств тиристоров достаточно иметь 3...5°.
Если угол опережения поддерживать постоянным, то cosj зависит от нагрузки
 ,
,
и синхронный двигатель работает с наибольшим коэффициентом мощности и наилучшими энергетическими показателями только в номинальном режиме. Во всех других режимах, т.е. с уменьшением нагрузки, привод работает с ухудшенными энергетическими показателями.
Наоборот, выполнение способа управления bmin=f(g) при dmin обеспечивает работу СД с максимальной величиной коэффициента мощности
 ,
,
т.е. с минимальным потреблением реактивной энергии, и наилучшими энергетическими показателями при всех возможных значениях частот машинной коммутации и моментов нагрузки. При реальных углах коммутации и малом времени восстановления вентилей коэффициент мощности стремится к единице, а КПД вентильного двигателя к КПД синхронного двигателя.
Дата добавления: 2016-01-07; просмотров: 1732;