Многоуровневая структура электропривода

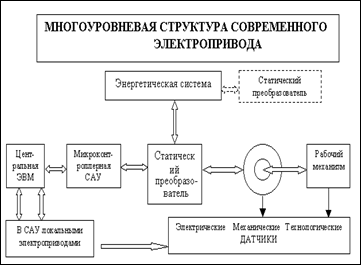
Отличительной особенностью современного регулируемого привода переменного тока является наличие следующих основных элементов (на рисунке):
· простого и надёжного асинхронного или синхронного двигателя, минимизированного по массогабаритным, стоимостным и энергетическим показателям;
· преобразователя частоты со звеном постоянного тока с инвертором на полностью управляемых приборах и неуправляемым выпрямителем;
· датчиков электрических, механических и технологических параметров регулирования, обеспечивающих требуемую точность стабилизации координат в замкнутой системе;
· микропроцессорной системы управления с функциями непосредственного регулирования выходных координат, формирования законов широтно-импульсного управления (ШИМ), диагностики, защиты и прогнозирования, взаимодействия с другими локальными приводами.
Задача объединения в единую систему различных по природе функционально–законченных элементов электропривода возлагается на многоуровневые сопрягающие устройства. Это совокупность конструктивных, схемотехнических и программных средств.
Сопрягающее устройство первого уровня характеризуется механико–энергетическим взаимодействием двигателя и рабочего механизма и представляет собой механическую передачу энергии от электрической машины на исполнительный механизм. Его функции сводятся к согласованию движения двигателя и исполнительного органа механизма при максимальном КПД передачи и устойчивой работе во всех режимах.
Устойчивая работа обеспечивается согласованием механических характеристик двигателя и механизма. Быстродействие механической части привода характеризуется электромеханической постоянной времени Тм, имеющей порядок от десятых долей до нескольких секунд.
Пятый уровень – устройства информационно-измерительной системы привода. Измеряемыми являются физические величины:
· электрические (ток, напряжение, ЭДС и т.п.)
· механические (момент, скорость, перемещение и т.п.)
· технологические (давление, температура, напор и т.п.).
Устройства пятого уровня осуществляют преобразование сигналов с первичных датчиков, гальваническую развязку, усиление и аналого – цифровое преобразование сигналов для представления их в формате микроконтроллерной системы управления.
Микроконтроллерная САУ содержит энергетическую модель электромеханического устройства, которая учитывает четыре составляющих: сеть, преобразовательное устройство, двигатель и технологический механизм в плоскостях потребления энергии, ее использование и энергоуправление.
Шестой уровень – интерфейс межприводного обмена, реализует координацию работы локальных электроприводов между собой и связь с центральной ЭВМ высшего уровня иерархии.
Под прямым цифровым управлением понимается не только непосредственное управление от микроконтроллера каждым ключом силового преобразователя, но и обеспечение возможности прямого ввода в микроконтроллер сигналов различных обратных связей с последующей программно – аппаратной обработкой внутри микроконтроллера. Таким образом, система прямого цифрового управления ориентирована на отказ от значительного числа дополнительных интерфейсных устройств и создание одноплатных контроллеров управления приводами.
В пределе встроенная система управления проектируется как однокристальная и вместе с силовым преобразователем и исполнительным двигателем конструктивно интегрируется в одно целое – мехатронный модуль движения.
Дата добавления: 2016-01-07; просмотров: 1254;