Двигатели постоянного тока (ДПТ)
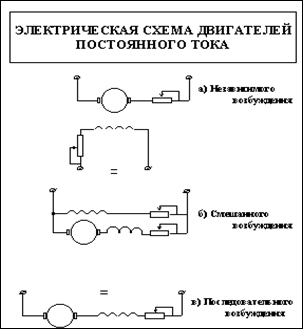
Различают двигатели постоянного тока в зависимости от схемы подсоединения обмотки якоря и обмотки возбуждения:
· независимого (параллельного) возбуждения;
· смешанного возбуждения;
· последовательного возбуждения.
Общее дифференциальное уравнение ДПТ
 ,
,
где  - электромеханическая постоянная времени двигателя;
- электромеханическая постоянная времени двигателя;  - электромагнитная постоянная двигателя; сд = kФ – постоянная двигателя.
- электромагнитная постоянная двигателя; сд = kФ – постоянная двигателя.
Уравнение электромеханической характеристики
 .
.
Двигатели независимого возбуждения имеют жесткую естественную механическую характеристику (1), двигатели последовательного (2) и смешанного возбуждения (3) - мягкую.

Скорость двигателя регулируется изменением:
· напряжения якоря;
· сопротивления цепи якоря;
· магнитного потока.
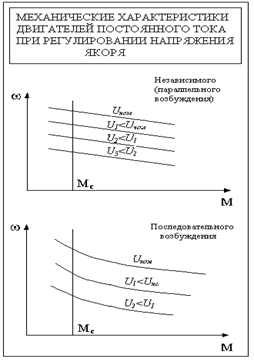
В двигателях постоянного тока наиболее рациональным способом регулирования частоты вращения является изменение напряжения, приложенного к якорю двигателя. На рисунке приведены естественная и искусственные характеристики. Регулирование напряжением осуществляется в большом диапазоне скоростей с постоянным моментом и жесткостью (для ДТП независимого возбуждения), вверх и вниз от естественной характеристики. Регулирование экономичное, однако требуется регулятор напряжения (выпрямитель).
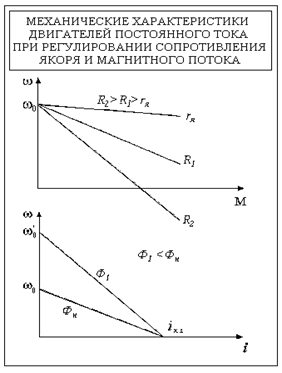
С увеличением сопротивления реостата в цепи якоря увеличивается наклон характеристики, регулирование вниз от естественной характеристики. При большой величине реостата характеристики становятся мягкими и двигатель работает неустойчиво. Дляполучения устойчивой работы привода применяют шунтирование якоря ДТП. Регулирование не экономично. Энергия скольжения (регулирования) выделяется в виде тепла на дополнительном реостате.
При уменьшении потока возбуждения увеличивается скорость идеального холостого хода и статический перепад скорости. Ток короткого замыкания
 .
.
Регулирование с постоянной мощностью. Достоинства – простота и экономичность. Недостатки - регулирование только вверх в небольшом диапазоне (10-15%). При этом размагничивается магнитная система электродвигателя и падает перегрузочная способность.
Достоинство привода с двигателями постоянного тока – отличные регулировочные свойства (работа в четырех квадрантах, управление по трем параметрам). Недостаток – низкая надежность вследствии наличия механического коммутационного узла (коллектора).
Двигатели независимого возбуждения используются в шахтных подъемниках, крановых установках, специальных видах приводов, двигатели последовательного возбуждения - в электрическом транспорте.
Дата добавления: 2016-01-07; просмотров: 1668;