Асинхронные двигатели (АД)

Различают асинхронные двигатели с короткозамкнутым и фазным ротором.
Синхронная скорость и скольжение АД
 ,
,  ,
,
где f – частота сети; р – число пар полюсов.
Зависимость момента от скольжения (формула Клосса)
 ,
,
где  ,
,  - критические момент и скольжение двигателя;
- критические момент и скольжение двигателя;  - перепад скорости, соответствующий критическому моменту; U – напряжение сети; l, р, Lk, r2¢ - перегрузочная способность, число пар полюсов, индуктивность короткого замыкания и приведенное сопротивление ротора двигателя.
- перепад скорости, соответствующий критическому моменту; U – напряжение сети; l, р, Lk, r2¢ - перегрузочная способность, число пар полюсов, индуктивность короткого замыкания и приведенное сопротивление ротора двигателя.
Достоинство асинхронных двигателей – простота конструкции. К недостаткам следует отнести: низкие энергетические показатели (КПД и коэффициент мощности), большой ток холостого хода (около 50% от номинального), квадратичная зависимость критического момента от напряжения, самая низкая перегрузочная способность среди электрических машин, а также малая величина воздушного зазора.
Скорость АД регулируется изменением следующих параметров:
· сети (напряжение, частота);
· двигателя (число пар полюсов, индуктивность, сопротивление ротора).

Естественная механическая характеристика асинхронного двигателя имеет вид кривой, как показано на рисунке. Рабочая часть характеристики является жесткой. В асинхронных двигателях с фазным ротором в зависимости от сопротивления в цепи ротора имеется семейство искусственных характеристик, (w0=const, DwkºR, Mk=const). При этом, чем больше сопротивление цепи ротора, тем мягче характеристика (при закороченном роторе R= 0 естественная характеристика).
Реостатное регулирование благодаря своей простоте широко применялось в подъёмно-транспортных устройствах. Недостатки: ступенчатое изменение скорости, невысокое быстродействие, большие потери энергии.
Взаимодействие намагничивающих сил статора и ротора возможно только при одинаковом числе пар полюсов их обмоток. Поэтому регулирование числом пар полюсов применимо только для АД с короткозамкнутым ротором, обмотка ротора которого автоматически образует такое же число пар полюсов, что и обмотка статора. Двухскоростные двигатели изготавливают как с двумя независимыми статорными обмотками, так и однообмоточными с секционированием обмоток.
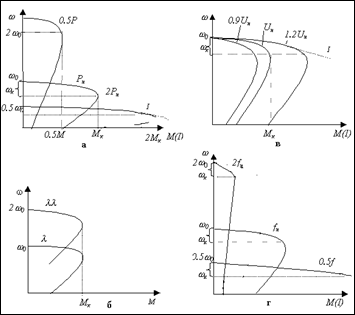
В первом случае (рис. а) двигатель имеет повышенные габариты, низкие КПД и коэффициент мощности, много неиспользованной меди (w0º1/p, Dwkº1/p, Mkºp).
Наиболее просто переключаются числа пар полюсов в отношении 1:2. Для этого обмотка каждой фазы выполняется из двух секций. При изменении направления тока в одной из них меняется число пар полюсов. Обычно переключают обмотки статора со звезды на двойную звезду, или с треугольника на двойную звезду. Переход на двойную звезду сопровождается уменьшением в два раза числа пар полюсов, т. е. увеличением в 2 раза скорости. При этом перегрузочная способность остается постоянной.
Регулирование скорости АД включением в цепь статора дополнительной индуктивности осуществляется за счет перераспределения напряжения между ними (w0=const, Dwkº1/Lk, Mkº1/Lk). Ввиду малого диапазона регулирования и снижения перегрузочной способности на практике почти на применяется.
Регулирование скорости изменением напряжения ухудшает электромеханические свойства АД (w0=const, Dwk=const, MkºU2). При уменьшении напряжения резко падает перегрузочная способность двигателя (при U=0.9Uн критический момент уменьшается на 19%), при увеличении – возрастает ток и увеличивается нагрев обмотки статора (рис. в). Поэтому регулирование возможно в небольшом диапазоне.
Скорость АД пропорциональна частоте питающей сети (w0ºf, Dwk=const, Mkº1/f2). При увеличении частоты скорость увеличивается, критический момент уменьшается, а соответствующий ему перепад скорости остается постоянным (рис. г). С уменьшением частоты перегрузочная способность возрастает, однако увеличивается ток, т. е. нагрев двигателя.
Если изменяеть напряжение и частоту двигателя по частотному закону U/f = const, то магнитный поток и критический момент двигателя остаются неизменными (w0ºf, Dwk=const, Mk=const). Регулирование возможно в широком диапазоне при постоянной жесткости характеристик.
Асинхронные двигатели используются практически во всех видах установок, при этом в большинстве случаев распространение получили асинхронные двигатели с короткозамкнутым ротором.
С увеличением мощности двигателя увеличивается его номинальные значение КПД и коэффициента мощности, фактические значения которых в зависимости от коэффициента загрузки двигателя приближенно оцениваются данными таблицы.
| Коэффициент загрузки kз | КПД | коэффициент мощности |
| 0,1 | 0,48 | 0,34 |
| 0,2 | 0,68 | 0,56 |
| 0,3 | 0,79 | 0,70 |
| 0,4 | 0,86 | 0,79 |
| 0,5 | 0,93 | 0,87 |
| 0,6 | 0.97 | 0,93 |
| 0,7 | 1,0 | 0,97 |
| 0,8 | 1,01 | 1,0 |
| 0,9 | 1,01 | 1,0 |
| 1,0 | 1,0 |
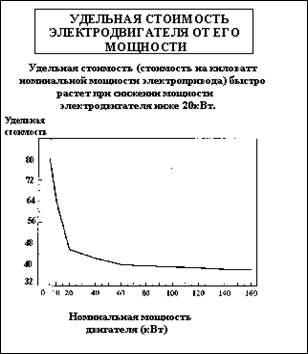
Двигатели малой мощности отличаются непропорциональной большой удельной стоимостью (стоимость 1 кВт) по сравнению с крупными электрическими двигателями. Приведенный график показывает, что удельная стоимость перестает существенно изменяться при мощностях двигателя выше 60 кВт.
Двигатели мощностью ниже 200 кВт обычно имеют напряжение 380 В, более 300 кВт - 6 (10) кВ, и двигатели мощностью 200 - 300 кВт имеют напряжение либо 380 В либо 6 (10) кВ.
Капитальные затраты учитываются в первую очередь при принятии решения о приобретении двигателя, но с учетом срока службы электродвигателя, эксплуатационные затраты (стоимость потребленной электроэнергии и обслуживания) на порядок и более превосходят капитальные.
Дата добавления: 2016-01-07; просмотров: 2314;