Частотно-регулируемый электропривод (ЧРП)
Скорость асинхронных двигателей пропорциональна частоте напряжения питающей сети. Таким образом, изменение скорости вращения двигателя может быть достигнуто путём изменения частоты потребляемого напряжения. С другой стороны, момент двигателя пропорционален магнитному потоку в воздушном зазоре двигателя. Последний, в свою очередь, пропорционален питающему напряжению и обратно пропорционален частоте питающего напряжения. Таким образом, момент двигателя может быть изменён путём подстройки питающего напряжения под любую требуемую частоту.
Для получения постоянного момента АД при изменяющихся скоростях, необходимо иметь источник энергии с регулируемыми напряжением и частотой, который будет поддерживать постоянным отношение U / f=const, где U - напряжение питающей сети; f - частота.
Самый известный способ получения этого типа энергии - это преобразование переменного тока на промышленной частоте 50 Гц в постоянный ток с помощью выпрямителя, а затем обратно в переменный ток при помощи инвертора. В этой схеме напряжение регулируется выпрямителем, а частота инвертором.
Функциональная схема частотно-регулируемого электропривода показана на рисунке.

Основными элементами частотно-регулируемого привода являются выпрямитель, инвертор, асинхронный или синхронный двигатель, программируемый микроконтроллер. В добавление к перечисленному используются индуктивности и (или) ёмкости для стабилизации выхода выпрямителя и минимизации уровня высших гармоник.
Когда большая индуктивность соединена последовательно с выходом выпрямителя, то такая система называется инвертором тока. Когда же большая ёмкость соединена параллельно с выходом выпрямителя - то это инвертор напряжения.
В дополнение используется широтно-импульсная модуляция (ШИМ). В этой схеме применяется неуправляемый выпрямитель, а переменный ток с регулируемой частотой и регулируемым уровнем напряжения формируется инвертором. ШИМ уменьшает содержание гармоник на выходе инвертора путём улучшения формы кривой тока инвертора тока или формы напряжения на выходе инвертора напряжения.
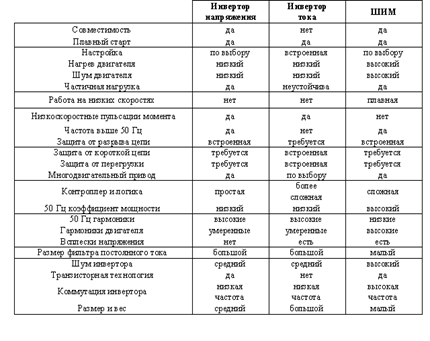
Сумма свойств, включая некоторые преимущества и недостатки трёх типов частотно-регулируемых электроприводов, показаны в таблице.
Частотный способ регулирования обеспечивает:
· плавное регулирование скорости двигателя в широком диапазоне в обе стороны от номинальной;
· жесткие искусственные характеристики;
· постоянную перегрузочную способность.

Для обеспечения требуемых характеристик двигателя одновременно с изменением частоты необходимо изменять и величину питающего напряжения в зависимости от характера изменения нагрузки:
· лифтовая нагрузка

 ;
;
· вентиляторная нагрузка

 ;
;
· тяговая нагрузка

 ;
;
· линейная нагрузка

 .
.
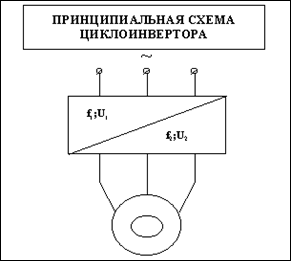
Кроме этого применяются электроприводы с непосредственным преобразованием частоты, они имеют ряд достоинств:
· однократное преобразование энергии и, следовательно, высокий КПД;
· свободный обмен реактивной и активной энергией из сети к двигателю и обратно;
· отсутствие коммутирующих конденсаторов.
К недостаткам относятся:
· ограниченный диапазон регулирования выходной частоты;
· сравнительно большое число силовых вентилей.
Используются циклоинверторы для плавного регулирования частоты вращения тихоходных двигателей.
Международный консорциум «Энергосбережение» (МКЭ), созданный ведущими предприятиями электротехнической промышленности Украины, России и Белоруссии в 1995 г., разработал и освоил серийное производство на ряде заводов СНГ серии энергосберегающих электроприводов РЭН мощностью до 1000 кВт, построенных по схеме автономного инвертора АИН на IGBT транзисторах.
Для оптимизации работы пары ПЧ-насос, например, электропривод Unidrive VТС имеет квадратичную характеристику U/f, каторая позволяет преобразователю "подстроиться" под механизм и управлять им по оптимальной характеристике, сводя к минимуму потери энергии. При снижении нагрузки на валу двигателя и, соответственно, уменьшении тока статора, преобразователь снижает напряжение двигателя, сохраняя частоту неизменной. При этом уменьшаются потери энергии в статоре двигателя.
При возрастании нагрузки на валу двигателя процесс протекает в обратной последовательности и ПЧ возвращается на номинальную характеристику.
Из функций, необходимых при управлении насосами и вентиляторами, следует также отметить возможность "подхвата" вращающегося двигателя и возможность автоматического перезапуска при исчезновении питания. Преобразователь может перезапускаться до 5 раз с задержкой перед включением до 25 секунд, что достаточно для подавляющего большинства насосов и вентиляторов.
Преобразователь имеет 3 пропускаемых частоты, настраиваемых пользователем и позволяющих избежать резонанса в механизме и двигателе.
Для обеспечения повышенного пускового момента в приводах Unidrive VТС предусмотрена возможность форсировки напряжения на низких частотах вращения. Благодаря увеличению напряжения на обмотке статора двигателя момент, развиваемый двигателем, также увеличивается, позволяя стронуть механизм с повышенным пусковым моментом.
Сфера применения частотно-регулируемого электропривода:
· насосы холодной и горячей воды (от подкачек до магистральных);
· компрессоры, воздуходувки, вентиляторы систем охлаждения, тягодутьевые вентиляторы котлов;
· рольганги, конвейеры, транспортеры и другие транспортировочные устройства;
· дробильное оборудование, мешалки, экструдеры;
· центрифуги различных типов;
· линии производства металлического листа, пленки, картона, бумаги и других ленточных материалов;
· буровое оборудование (насосное, подъемное);
· устройства откачки нефти из скважин (станки-качалки, погружные насосы и пр.);
· электродвижение и вспомогательные механизмы речного и морского транспорта;
· краны (от тельферов до мостовых);
· металлообрабатывающие станки, пилы, прессы и другое технологическое оборудование;
· высокооборотные (до 90000 об/мин) механизмы: шпиндели шлифовальных станков и др.
2.4. Асинхронный электропривод с фазным управлением (ТРН-АД)
Тиристорный регулятор напряжения (ТРН) выполняется по схеме встречно-параллельно включенных тиристоров и используется для регулирования напряжения и обеспечения "мягкого" пуска двигателя.
Исходя из фактического коэффициента загрузки kЗ минимальное напряжение регулятора должно составлять с учетом коэффициента запаса (1,2¸1,3)
 .
.
Если статический момент механизма имеет вид МС1, то запуск и последующая работа двигателя возможны при напряжении UЗ. Если статический момент имеет вид МС2, то запуск производиться при напряжении U1 с последующим переходом на напряжение UЗ.

Для определения экономической эффективности регуляторов напряжения необходимо знать фактический ток работы двигателя IФ. Исходя из номинального тока двигателя определяем загрузку двигателя по току
 .
.
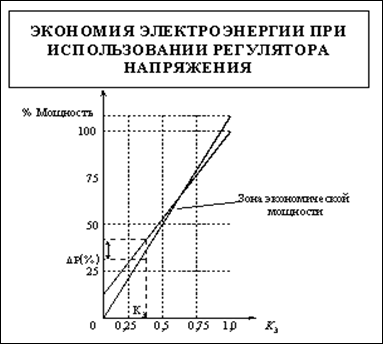
Для любой мощности можно вычислить величину k3 и по графику определить экономию мощности DP. Умножая полученную величину на номинальную мощность двигателя и годовое число использования двигателя, получим годовую экономию энергии.
Примером таких устройств могут служить аппараты "мягкого пуска" серии SIKOSTART фирмы "Siemens", обеспечивающие для двигателей мощностью до 710 кВт управление эффективным значением напряжения на клеммах двигателя. Наряду с многочисленными возможностями настройки для мягкого старта (роста напряжения, ограничения тока, пускового импульса и т.п.), которые позволяют согласование с различными видами нагрузки (насос, вентилятор) в аппарат введены дополнительные функции управления после старта и во время отключения (торможение).
В СНГ выпускаются тиристорные пусковые устройства мощностью 75-400 кВт (УПТ-2), которые обеспечивают плавный разгон двигателя под нагрузкой с ограничением пускового тока до 4Iном, бездуговую коммутацию асинхронного двигателя к сети (функция контактора), защиту двигателя от перегрузки, обрыва фазы, короткого замыкания, повышения напряжения, превышения допустимой температуры обмоток и подшипников, пуск механизмов с повышенным моментом трогания (более 2Мном), безударное закрытие клапанов обратного хода в гидравлических системах (плавная остановка двигателя насоса), контроль изоляции обмоток двигателя, принудительное торможение электродвигателя.
Дата добавления: 2016-01-07; просмотров: 2035;