Вентильно-индукторный двигатель (ВИД)
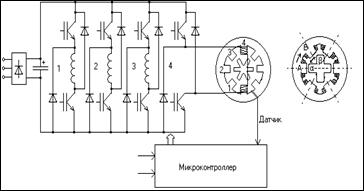
Вентильно-индукторный двигатель, одна из возможных схем которого показана на рисунке, состоит из специальной четырехфазной электрической машины, электронного коммутатора на силовых транзисторных модулях и блока микроконтроллерного управления.
У индукторной машины (ИМ) магнитная индукция в каждой точке рабочего зазора изменяется только по величине, а ее направление остается постоянным. Отсюда следует, что индукция в зазоре индукторных машин имеет пульсирующий характер и содержит переменную (рабочую) и постоянную (нерабочую) составляющие. Изменение во времени магнитного потока, сцепленного с обмоткой якоря, достигается за счет периодического изменения магнитного сопротивления на пути рабочего потока при вращении зубчатого ротора. Так как число зубцов на роторе можно сделать большим, ИМ характеризуется повышенными частотами тока (f » 400…30000 Гц).
Статор и ротор электрической машины выполнены шихтованными явнополюсными, причем число полюсов статора и ротора неодинаково: 6/4, 8/6 и т.д. На статоре расположены сосредоточенные обмотки (катушки), соединенные через электронный коммутатор с источником питания постоянного тока (выпрямитель, аккумулятор).
Коммутатор состоит из группы электронных ключей, открытое или закрытое состояние которых диктуется положением пассивного явнополюсного ротора, фиксируемых специальным датчиком и сигналами микропроцессорного управления, за счет чего формируются нужные токи в обмотках.
Принцип действия привода основан на магнитном притяжении ближайшего полюса ротора к активизированному индуктору – полюсу статора с катушкой. Так, переключение тока с катушки А статора, к которой был притянут полюс a ротора, на катушку В статора (по часовой стрелке) приведет к повороту ротора, такому, что к полюсу В притянется ближайший полюс b ротора (против часовой стрелки). Повторение указанных переключений, диктуемое датчиками фактического положения ротора, приведет к непрерывному вращению с требуемой частотой.
Таким образом, электромеханическое преобразование энергии (создание момента) в таком приводе основано на принудительном изменением магнитного сопротивления RM по угловой координате машины q за счет переключения токов в катушках статора. Изменение магнитного сопротивления обусловливает создание момента

Формирование в каждый момент времени токов нужной величины обеспечивает плавность движения при достижении требуемых моментов с малыми пульсациями. Формирование токов производится посредством широтно – импульсной модуляции, осуществляемой сигналами микропроцессорного устройства, подаваемыми на основные ключи коммутатора. Качественное функционирование привода при предельно простой машине достигается за счет совершенных ключей коммутатора и развитой системы микропроцессорного управления.
К преимуществам ВИД относятся:
· высокая технологичность и за счет этого низкая трудоемкость производства двигателя (простая конфигурация магнитной системы, отсутствие коллектора, беличьей клетки, постоянных магнитов, машинная намотка катушек);
· экономия активных материалов до 30%, использование лишь недефицитных и недорогих материалов (не используются дорогостоящие редкоземельные магниты);
· низкая себестоимость машины – в 1,7 – 2 раза ниже себестоимости самого дешевого асинхронного короткозамкнутого двигателя (по оценкам западных специалистов);
· экологическая чистота производства (отсутствует вредная для окружающей среды операция пропитки статора в целом, пропитываются лишь катушки) и утилизации (легко разделяются железо и медь, отсутствуют вредные в переработке редкоземельные магниты);
· упрощенная и более надежная по сравнению с преобразователем частоты для асинхронного электропривода схема и конструкция силового коммутатора за счет однополярной коммутации;
· широкие функциональные возможности – работа в зоне низких (десятки – сотни об/мин) или высоких (десятки тысяч об/мин) частот вращения с широким диапазоном регулирования и большими моментами в зоне низких частот;
· высокие энергетические показатели, не уступающие ближайшим аналогам;
· высокая надежность привода в целом;
По зарубежным данным некоторые показатели трех типов электроприводов для машины с высотой вала 112 мм приведены в таблице.
| Тип электропривода | Номинальная мощность, кВт | Номинальная мощность к oбъему актив-ных атериалов | КПД |
| Постоянного тока Асинхронный Вентильно-индукторный | 1,2 1,7 |
Совокупность свойств вентильно-индукторного привода позволяет прогнозировать наиболее перспективные области его применения в ближайшие годы:
· электрический транспорт, в частности автономный, с аккумуляторным питанием, а также городской;
· центробежные машины – вентиляторы, насосы, где ВИД может революционно изменить привычные конструктивы и режимы, дать заметный эффект в сфере энерго- и ресурсосбережения;
· станки, другие обрабатывающие машины;
· бытовая техника.
Весьма интересны перспективы встраивания элементов ВИД в технологические машины – мотор-колесо, крыльчатка вентилятора, совмещенная с ротором обращенной машины и т.п.
Дата добавления: 2016-01-07; просмотров: 5694;