Б) Двигатель с параллельным возбуждением.
Схема двигателя с параллельным возбуждением представлена на рис. 5-57. Пусковой реостат здесь имеет три зажима. Один из них (ручка реостата) присоединяется к сети; другой (конец пускового сопротивления) — к якорю; третий (полоска, по которой скользит ручка реостата) — к обмотке возбуждения или через регулировочный реостат Rp, или непосредственно.
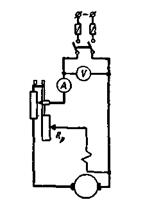
Рис. 5-57. Двигатель с параллельным возбуждением.
Пусковой реостат имеет холостой контакт, не соединенный с пусковым сопротивлением, выполняемый иногда из какого-нибудь изоляционного материала.
Первый контакт пускового реостата соединяется с полоской, к которой присоединена обмотка возбуждения (рис. 5-57). Это делается для того, чтобы цепь возбуждения при остановке двигателя, когда ручка реостата ставится на холостой контакт, была замкнута. Она при этом будет замкнута на обмотку якоря, пусковое сопротивление и регулировочный реостат, если он имеется.
Энергия магнитного поля, запасенная в магнитной системе машины, будет постепенно переходить в электрическую энергию; уменьшение магнитного потока, сцепляющегося с обмоткой возбуждения, вызовет в ней сравнительно небольшую э.д.с. Резкий же разрыв цепи возбуждения при наличии в ней тока приводит к быстрому изменению потока и, следовательно, к появлению большой э.д.с. в обмотке возбуждения, опасной для ее изоляции.
Выключать рубильник следует после того, как ручка реостата поставлена на холостой контакт. Отключая двигатель указанным способом, мы предохраняем контакты рубильника от подгорания и сеть от резкого изменения нагрузки; кроме того, при следующем включении двигателя в сеть мы обеспечиваем пуск его при включенном пусковом реостате.
Магнитный поток Ф двигателя с параллельным возбуждением при Iв = const изменяется из-за реакции якоря незначительно. Поэтому с большим приближением можно считать в соответствии с (5-49), что его вращающий момент пропорционален току якоря:
M º Ia. (5-60)
Зависимость n = f(I) при Iв = const и U = const называется скоростной характеристикой (рис. 5-58). Ток I = Ia + Iв мало отличается от тока Ia, так как Iв составляет небольшую долю от Iн.
Зависимость n = f(M) при Iв = const и U = const называется механической характеристикой (рис. 5-58). Она отличается от скоростной практически только масштабом по оси абсцисс. Сплошная кривая на рис. 5-58 представляет собой обычную характеристику. Она показывает, что скорость вращения с увеличением нагрузки на валу падает.
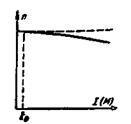
Рис. 5-58. Скоростная n = f(I) или механическая n = f(М) характеристика двигателя с параллельным возбуждением.
Обратимся к формуле (5-59) для скорости n. Из нее видим, что при увеличении тока уменьшается числитель U—IаSr, при этом будет также уменьшаться знаменатель Ф вследствие реакции якоря. Обычно числитель уменьшается больше, чем знаменатель. Поэтому скорость вращения при увеличении I (или М) будет падать. Если же в двигателе создается сильная реакция якоря, что приводит к большому уменьшению потока Ф, то скорость вращения с увеличением нагрузки будет не падать, а возрастать, например, согласно пунктирной кривой на рис. 5-58. Двигатель с такой характеристикой для работы в обычных условиях практики непригоден, так как он будет работать неустойчиво (рис. 5-56,б).
Показанный на рис. 5-58 ток I0 есть ток двигателя при холостом ходе (при отсутствии нагрузки на валу).
Двигатели с параллельным возбуждением являются лучшими из регулируемых электродвигателей. Они позволяют плавно и экономично регулировать скорость вращения.
На рис. 5-59 приведены рабочие характеристики двигателя с параллельным возбуждением: М, n, I, h = f(Р2) при U = const и Iв = const (h — к.п.д., Р2 — мощность на валу).
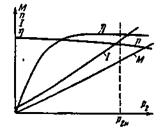
Рис. 5-59. Рабочие характеристики двигателя с параллельным возбуждением.
Формула (5-59) показывает, что для изменения n достаточно изменять поток Ф. Изменение потока достигается путем изменения тока возбуждения при помощи регулировочного реостата Rр (рис. 5-57). Так как ток возбуждения составляет небольшую долю номинального тока якоря, то при указанном способе регулирования скорости вращения потери в регулировочном реостате незначительны.
При увеличении тока возбуждения скорость вращения падает, при уменьшении тока возбуждения она возрастает.
При уменьшении Iв поток становится меньше. Так как при этом скорость вращения в первый промежуток времени остается почти постоянной вследствие инерции вращающихся частей, то уменьшается э.д.с. Еа. Уменьшение Еа приводит согласно (5-56) к увеличению тока якоря Iа, причем даже небольшое уменьшение Еа дает относительно большое увеличение тока Ia, так как значения U и Еа мало отличаются одно от другого.
В качестве примера рассмотрим работу двигателя при U = 110 В, Еа= 105 В, Sr = 0,08 Ом и токе якоря
 А.
А.
Если магнитный поток Ф уменьшить путем уменьшения тока возбуждения на 5%, то э.д.с. Еа в первый промежуток времени, когда скорость еще не успела возрасти, будет равна приблизительно 100 В, а ток якоря
 А,
А,
т. е. при уменьшении Ф на 5% ток возрастает приблизительно на 100%.
Обращаясь к формуле (5-49), мы устанавливаем, что момент М, развиваемый двигателем, повышается, потому что Ia увеличивается больше, чем уменьшается Ф. Увеличение М приводит к увеличению скорости вращения. При ее увеличении будет возрастать э.д.с. Еа, следовательно, будут уменьшаться Ia и М. Режим устанавливается при более высокой скорости вращения, при которой момент двигателя М будет равен моменту нагрузки Мст.
Применяя аналогичные рассуждения, можно доказать, что при увеличении тока возбуждения скорость вращения будет падать.
Рассмотрим, как производится определение скоростной характеристики n = f(I) и механической характеристики n = f(M). Оно может быть произведено при помощи кривой Ea/n = f(Iв), полученной из характеристики холостого хода, снятой опытным путем или найденной путем расчета. Эта кривая представлена на рис 5-60. При других масштабах на осях координат она представляет собой зависимость Ф = f (Fв), так как  .
.
Будем считать, что известны величины при номинальной нагрузке: Uн, Iaн (Iан = Iн-Iв. н), nн, Iв. н, Iв(р.я) или Fр.я (Iв(р.я) - ток возбуждения, соответствующий размагничивающей н.с. реакции якоря Fря) Тогда определение скорости вращения n при холостом ходе производится следующим образом.
Сначала находим э.д.с. якоря при номинальной нагрузке Еа н = Uн-Iа нSr, затем — э.д.с. якоря при холостом ходе E0 = Uн-Iа0Sr, причем для двигателей, имеющих ток холостого хода Ia0<0,1Iн можно приближенно принять Eа0 » Uн. Далее по кривой рис. 5-60 находим для Iв.н =  :
:
 (5-61)
(5-61)
и для Iв.н-Iв(р.я) =  :
:
 . (5-62)
. (5-62)
Из равенств (5-61) и (5-62) получаем:
 . (5-63)
. (5-63)
Очевидно, что  , т. е. отношению потоков при нагрузке Фн и при холостом ходе Ф0.
, т. е. отношению потоков при нагрузке Фн и при холостом ходе Ф0.
Если известна скорость вращения n0 при холостом ходе, то скорость вращения при нагрузке равна:
 . (5-64)
. (5-64)
Промежуточные значения скорости вращения при Ia<Iaн найдем определив Еа и Iв(р.я) для тока Iа.
Зная Еа, Iа и n, найдем вращающий момент, кг·м
 , (5-65)
, (5-65)
и, следовательно, можем построить механическую характеристику n = f(M). Как отмечалось, для устойчивой работы двигателя необходимо, чтобы n0 было больше nн.
Если двигатель с параллельным возбуждением предназначается для широких пределов регулирования скорости вращения (например, 4:1) путем изменения тока возбуждения, то при ослабленном поле реакция якоря может оказаться слишком сильной (работа будет протекать на начальной части кривой рис. 5-60) и мы можем получить  > Еа0/Еан и nн>n0 согласно (5-64).
> Еа0/Еан и nн>n0 согласно (5-64).
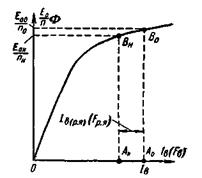
Рис. 5-60. К определению скоростной характеристики.
Тогда необходимо для уменьшения относительного значения реакции якоря (величины Iв(р.я)/Iв.н) выполнить двигатель с увеличенным воздушным зазором d. Такие двигатели стоят дороже, чем нормальные двигатели с пределами регулирования скорости вращения примерно 1:1,5.
Регулировать скорость вращения двигателя можно также путем изменения напряжения U на зажимах якоря, что следует из формулы (5-59). Изменение U может быть достигнуто при помощи реостата, включенного в цепь якоря. Такой способ регулирования скорости вращения неэкономичен, так как он приводит к непроизводительной затрате большой энергии в реостате. Действительно, при уменьшении п, например, на 50%, если при этом ток в якоре остается неизменным, мы должны уменьшить U почти на 50% и, следовательно, почти половину мощности поглотить в реостате. Реостат при этом получается громоздким и дорогим, так как рассчитывается на длительную нагрузку большим током.
Дата добавления: 2016-01-29; просмотров: 2411;