И КИНЕМАТИЧЕСКИЕ СХЕМЫ ЭЛЕКТРОПРИВОДОВ
Электрические, механические и габаритные параметры электродвигателя взаимосвязаны. Например, номинальные мощность Рн, вращающий момент Мн, угловая скорость ротора (якоря) ωн, диаметр D и длина L активной части якоря электрической машины связаны соотношениями
Рн = Мн ωн; Мн = Ск D2 L,
где Ск – коэффициент, зависящий от конструктивных особенностей машины.
Из этих зависимостей следует, что при заданной мощности для уменьшения габаритов электродвигателя (D2L) необходимо увеличивать его угловую скорость ωн, особенно для маломощных двигателей (до ωн = 100…600 рад/с). А для рабочих машин по технологическим условиям требуется значительно меньшая скорость (в 10 и более раз). Поэтому для согласования механических параметров электродвигателя (скорости и момента) с механическими параметрами рабочей машины используют передаточный механизм (ПМ), который может изменять и характер движения, преобразуя вращательное движение в поступательное.
По конструктивному исполнению различают следующие виды ПМ (рис. 2.1):
1) редукторы (коробки передач, скоростей);
2) ременные (цепные) передачи;
3) типа барабан – трос (шкив – канат);
4) типа винт – гайка;
5) типа зубчатое колесо – рейка.
 |
Краткая характеристика представленных ПМ.
Редукторы(коробки передач, скоростей) представляют собой зубчатые передачи, заключенные в единый корпус. По числу зубчатых пар они бывают одно-, двух-, трех-, n-ступенчатые; по виду зубьев – прямозубые, косозубые, червячные; по исполнению – цилиндрические, конические; по принципу действия – обычные и планетарные.
Редуктор характеризуется передаточным числом i:
i = ω1 / ω2,
где ω1 – входная скорость; ω2 – выходная скорость.
Передаточное число n-ступенчатого редуктора
i = i1 × i2 ×…× in,
где i1, i2, …, in – передаточные числа отдельных ступеней.
Редуктор характеризуется также входной мощностью (до 560 кВт) и максимальным выходным моментом (до 1200 кН∙м). Входная и выходная оси редуктора могут быть расположены коаксиально, параллельно и ортогонально.
Ременные (цепные) передачихарактеризуются передаточным числом
i = ω1 / ω2 = D2 /D1 = z2 /z1,
где D1, z1 – диаметр число зубьев входного шкива (звездочки); D2, z2 – диаметр число зубьев выходного шкива (звездочки).
Передачи типа «зубчатое колесо – рейка», «барабан – трос (шкив – канат)» и «винт – гайка» преобразуют вращательное движение в поступательное и характеризуются радиусом приведения ρ:
ρ = V/ω, м/рад.
Кинематические схемы электроприводов.Механическая часть структурной схемы ЭП включает в себя все механически связанные между собой движущиеся инерционные массы: ротор (якорь) двигателя, ПМ и рабочее оборудование технологической установки. Непосредственное представление о движущихся массах установки и механических связях между ними дает кинематическая схема ЭП. Значит, кинематической схемой ЭПкакой-либо конкретной производственной установки называется схема механической части ЭП со всеми движущимися инерционными массами и механическими связями между ними. Кинематические схемы ЭП разнообразны. Рассмотрим два характерных их примера.
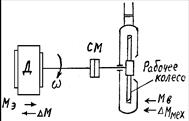
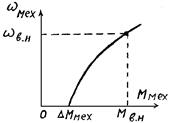
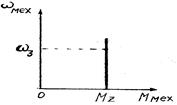
Кинематическая схема ЭП центробежного вентилятора (рис. 2.2). Ротор электродвигателя Д соединяется с рабочим колесом вентилятора с помощью соединительной муфты СМ. Все элементы кинематической схемы движутся с одной и той же угловой скоростью ω. На рабочем колесе вентилятора развивается момент сопротивления движению Ммех, зависящий от скорости ωмех (рис. 2.3):
Ммех = ∆Ммех + Мв.н. (ωмех / ωв.н)2;
ωв.н = ωн.дв,
где Мв.н, ωв.н – номинальные момент и угловая скорость вентилятора;
∆Ммех – момент механических потерь на трение в подшипниках рабочего колеса вентилятора.
| 
|
| Рис. 2.2. Кинематическая схема ЭП вентилятора | Рис. 2.3. Механическая характеристика вентилятора |
К ротору двигателя приложен электромагнитный момент двигателя Мэ, а также момент механических потерь в двигателе ∆М, обусловленный силами трения в подшипниках, и момент сопротивления движению Мв, создаваемый вентилятором.
Номинальная угловая скорость двигателя ωн.дв совпадает с номинальной скоростью вентилятора. Этим определяется простота кинематической схемы ЭП.
В других случаях ωв.н ≠ ωн.дв и в кинематическую схему вводят различные передачи: зубчатые, цепные, фрикционные, клиноременные и др. (см. рис. 2.1). Если требуется механическое регулирование скорости, вводят передачи с переменным передаточным числом i (коробки передач, фрикционные вариаторы).
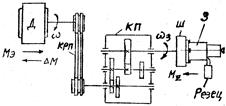
Кинематическая схема электропривода шпинделя токарного станка (рис. 2.4). В этой схеме движение от электродвигателя Д к шпинделю Ш с заготовкой обрабатываемой детали З передается через клиноременную передачу КРП и коробку передач КП. Передаточное число i может изменяться ступенчато за счет введения в зацепление шестерен с различным числом зубьев. В результате взаимодействия вращающейся детали с неподвижным резцом возникает усилие резания Fz и момент резания
Ммех = Мz = FzRз,
где Rз – радиус заготовки обрабатываемой детали.
В процессе обработки детали усилие и момент резания остаются постоянными и не зависят от угловой скорости ωз (рис. 2.5). Полезный момент нагрузки механизмаМмех при постоянном усилии резания Fz пропорционален радиусу обрабатываемой детали Rз.
| 
|
| Рис. 2.4. Кинематическая схема ЭП шпинделя токарного станка | Рис. 2.5. Механическая характеристика |
Кроме полезного момента нагрузки Ммех = Мz, а также приложенного к ротору двигателя электромагнитного момента М и момента потерь в двигателе∆М во всех элементах рассматриваемой кинематической цепи действуют силы трения: в подшипниках, в зубчатых зацеплениях, в трущихся поверхностях клиноременной передачи.
Механические характеристики производственных механизмов и электродвигателей.При выборе электродвигателя к производственному механизму приходится уточнять, насколько механические свойства электродвигателя соответствуют механической характеристике рабочей машины и характеру ее работы, так как соответствие механических характеристик электродвигателя конкретному производственному механизму позволяет обеспечить наиболее высокую его производительность и экономичную работу.
Механическая(или статическая)характеристика производственного механизмапредставляет собой зависимость между его статическим моментом сопротивления и скоростью, т.е.
ω = f (Mc) или Mc = f (ω).
Производственные механизмы обладают различными механическими характеристиками. Существует следующая эмпирическая обобщенная формула для механических характеристик производственных механизмов:
Mc = M0 + (Mc.н – M0)(ω / ωн)x,
где Mc – момент сопротивления механизма при угловой скорости ω;
M0 – момент сопротивления трения в движущихся частях механизма;
Mc.н, ωн – номинальные момент сопротивления и скорость;
x – показатель степени, характеризующий изменение момента Mc при изменении угловой скорости ω.
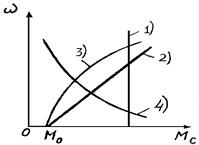
Различают четыре основных вида (класса, категории) механических характеристик и соответственно производственных механизмов (рис. 2.6):
| 
|
| Рис. 2.6. Механические характеристики производственных механизмов | Рис. 2.7. К пояснению жесткости механической характеристики электродвигателя |
1) x = 0, Mc = const (момент сопротивления не зависит от скорости). Такой механической характеристикой обладают механизмы, совершающие работу подъема, формоизменения материала или преодолевающие трение (подъемные механизмы, механизмы передвижения и др.). Мощность таких механизмов возрастает линейно со скоростью;
2) x = 1, Mc = сω (момент сопротивления линейно зависит от угловой скорости). Такую характеристику может иметь, например, привод генератора постоянного тока, работающего на постоянное сопротивление;
3) x = 2, Mc = сω2. Такой механической характеристикой обладают механизмы, работа которых сводится к преодолению сопротивления воздуха или жидкости (вентиляторы, центробежные насосы, центрифуги, судовые винты и др.). Момент сопротивления у таких механизмов часто называют вентиляторным, а механизмы – механизмами с вентиляторным моментом. Мощность таких механизмов примерно пропорциональна кубу скорости;
4) x = 3, Mc = с/ω. Такой механической характеристикой обладают моталки в металлургической промышленности, электронакат в бумажной промышленности, некоторые металлорежущие станки. Мощность на валу у таких машин приблизительно постоянна.
Механические характеристики электродвигателяпредставляют собой зависимость угловой скорости ω от развиваемого им момента на валу, т.е. ω = f (M).
Различают естественные и искусственные механические характеристики электродвигателя. Естественная механическая характеристика соответствует работе электродвигателя с номинальными параметрами при нормальной схеме включения. Искусственная механическая характеристика соответствует работе электродвигателя с параметрами, отличающимися от номинальных, например, при введении сопротивления, изменении питающего напряжения, частоты и др.
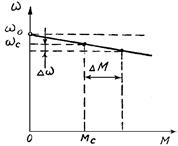
Для оценки изменения скорости при изменении момента на валу служит так называемая жесткость характеристики, которая равна отношению приращения момента ∆М к соответствующему приращению скорости ∆ω (рис. 2.7):
β = (M2 – M1) / (ω2 – ω1) = ∆М / ∆ω.
Линейные механические характеристики имеют постоянную жесткость, а криволинейные– в каждой точке свою, равную первой производной от момента по скорости, т.е.
β = dM / dω.
Естественные механические характеристики электродвигателей по степени жесткости разделяются на следующие группы (рис. 2.8):
1)  абсолютно жесткая характеристика (линия 1), при которой скорость электродвигателя при изменении нагрузки не изменяется (β = ∞). К этой группе относятся синхронные двигатели;
абсолютно жесткая характеристика (линия 1), при которой скорость электродвигателя при изменении нагрузки не изменяется (β = ∞). К этой группе относятся синхронные двигатели;
2) жесткая характеристика (линия 2), при которой скорость электродвигателя с возрастанием момента нагрузки уменьшается на небольшую величину (β = 40…10). К этой группе относятся асинхронные электродвигатели (работающие при скольжениях, меньших критического) и двигатели постоянного тока с параллельным (и независимым) возбуждением;
3) мягкая механическая характеристика (линия 3), при которой скорость электродвигателя резко уменьшается с увеличением момента нагрузки (β < 10). Такой характеристикой обладает двигатель постоянного тока с последовательным возбуждением.
При совместной работе электродвигателя с производственным механизмом в установившемся режиме вращающий момент двигателя уравновешивается статическим моментом сопротивления механизма, при этом электродвигатель работает с определенной скоростью. При изменении момента сопротивления на валу электродвигателя равновесие моментов нарушается, возникает переходный процесс, в результате которого электропривод переходит в новое установившееся состояние (при устойчивой работе), но с другими значениями момента и скорости электродвигателя. Для устойчивой работы электропривода в пределах определенных скоростей и моментов сопротивления производственного механизма требуется, чтобы электродвигатель обладал соответствующей механической характеристикой. А это достигается выбором электродвигателя определенного типа и изменением электрических параметров его цепей.
Дата добавления: 2015-12-01; просмотров: 5947;