ДЕТЕРМИНИРОВАННЫЕ СИГНАЛЫ 7 страница
где Т - интервал дискретизации, Т ≤π/ωm ; ωm - максимальная частота в спектре сигнала;

Записанное выражение может рассматриваться как разложение непрерывного сигнала в ряд по ортогональной системе функций (рис.6.10)
 (6.65)
(6.65)
с коэффициентами, равными значениям сигнала в выбранные моменты времени.
Если сигнал определен на интервале [О, Тc], то число интервалов разбиения равно
 (6.66)
(6.66)
а ряд Котельникова примет вид
 (6.67)
(6.67)
Ряд Котельникова может быть записан и для частотной области
 (6.68)
(6.68)
где S(ω) - спектральная плотность сигнала s(t); Ω = 2π/Tc - интервал дискретизации по частоте.
Общее число выборочных значений определяется как
 (6.69)
(6.69)
Примеры восстановления спектров сигналов по их дискретным значениям с использованием ряда Котельникова приведены в конце разд. 7.
Взяв выборочные значения сигнала, можно произвести его ступенчатую аппроксимацию
 (6.70)
(6.70)
где Т- интервал дискретизации сигнала по времени.
Выражение для спектральной плотности сигнала запишем в виде

Рис. 6.10
 (6.71)
(6.71)
Из (6.71) с уметом (6.70) получим
 (6.72)
(6.72)
Для четной функции s(t) запишем
 (6.73)
(6.73)
Аналогично можно подучить выражение, связывающее сигнал с выборочными значениями спектральной плотности
 (6.74)
(6.74)
Для действительной функции S(nΩ) получим
 (6.75)
(6.75)
Выражения (6.72) - (6.75) аналогичны ряду Котельникова. Они позволяют восстановить сигнал по дискретным значениям спектра и спектр по дискретным значениям сигнала.
Раздел 7.
ВОССТАНОВЛЕНИЕ НЕПРЕРЫВНЫХ СИГНАЛОВ С ПОМОЩЬЮ СПЛАЙНОВ
Одним из видов интерполирующей функции является сплайно- вая функция, или сплайн. Сплайн описывает интерполируемую функцию на каждом частном интервале дискретизации. Так, если функция задана на интервале [t0, tN], который выборкой разбит на частные интервалы [tk> tk+1], то сплайны дают описание функции на каждом частном интервале [tk, tk+1], а их совокупность описывает функцию на всем интервале ее задания (рис. 7.1). Обычно сплайн представляет степенной многочлен. Такого вида сплайны и рассматриваются в дальнейшем.
Интерполирующая функция φk(t) называется сплайном степени
n дефекта v, если она удовлетворяет следующим условиям:
на каждом интервале [tk, tk+1] функция является многочленом степени n;
 (7.1)
(7.1)
непрерывна и имеет на концах интервала (n - v) непрерывных производных, т.е.
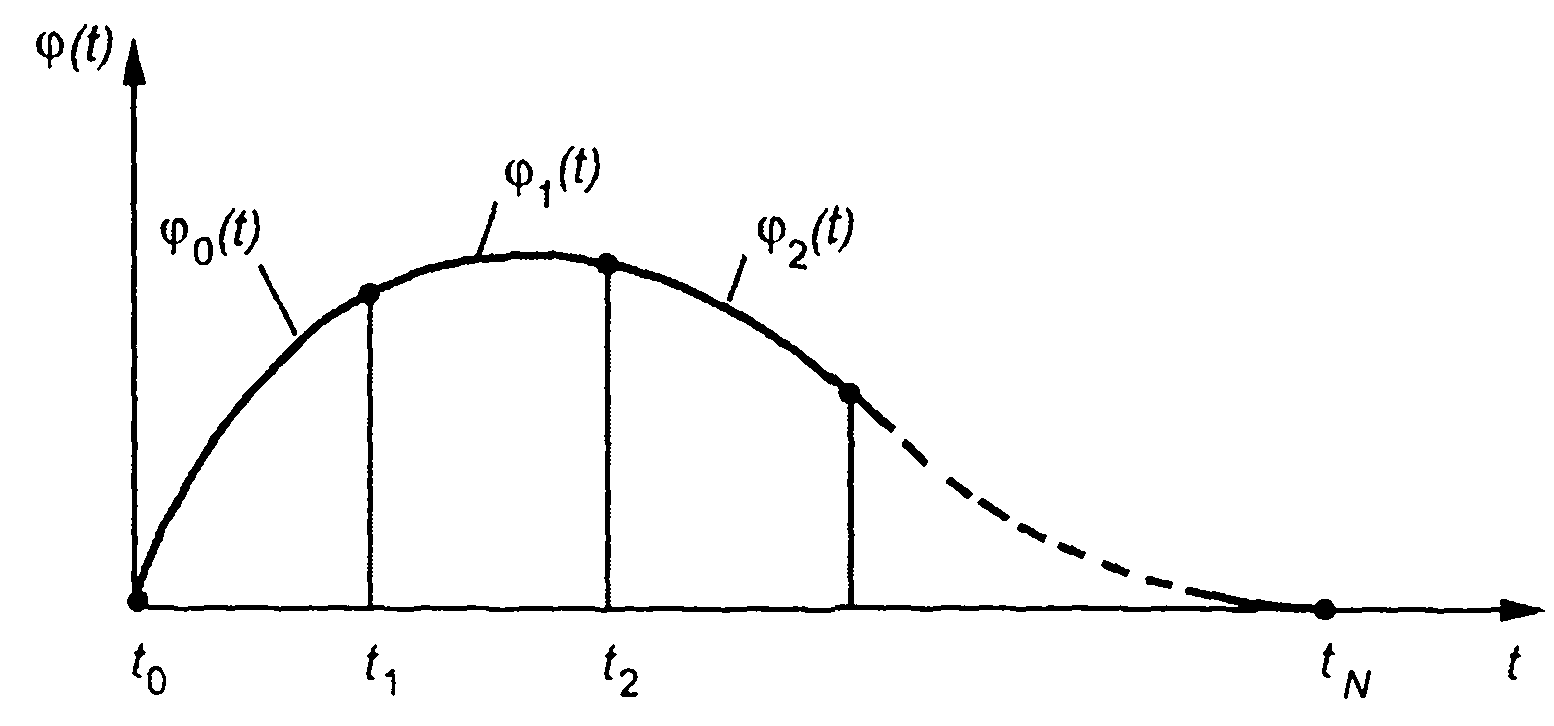
Рис. 7.1

Говорят, сплайн обладает n-v степенью гладкости.
Предельный вариант сплайна - кусочно-линейная функция, применяемая при линейной интерполяции. Такую функцию можно рассматривать как сплайн первой степени (n = 1) дефекта 1 (v = 1) Простейшими сплайнами, пригодными для использования на практике, являются кубические сплайны третьей степени дефекта 2 или 1. На их примере рассмотрим общий подход к построению сплайнов.
В дальнейшем излагаются методы построения сплайнов более сложной структуры, приводятся выражения для различных видов сплайнов, даются примеры их применения при восстановлении непрерывных сигналов - интерполяции временной функции, описывающей сигнал.
Одним из достоинств сплайновой интерполяции является то, что не требуется равномерной сетки интерполяции функции. В то же время на практике чаще всего используется постоянный интервал дискретизации сигнала. Вследствие этого в дальнейшем рассматривается вариант с равномерной сеткой интерполяции. Сплайны, построенные на равномерной сетке интерполяции, называются стационарными. Целесообразность такого рассмотрения подкрепляется еще и тем, что в этом случае выражения, описывающие сплайны, и приводимые в качестве иллюстрации методы, получаются проще.
7.1. Кубические сплайны первой степени гладкости
Сплайны третьей степени дефекта 2 называются кубическими сплайнами первой степени гладкости или эрмитовыми кубическими сплайнами. Исходными данными для их получения являются значения сигнала s(tK) и его первых производных в узлах интерполяции (ds/dt)tk. На каждом частном интервале [tK, tK+1] сплайн описывается выражением
 (7.2)
(7.2)
В точках дискретизации сплайн и его первая производная равны значениям сигнала и его производной
 (7.3)
(7.3)
Из (7.2) и (7.3) для начала и конца каждого частного интервала [tK, tK+1] получим четыре уравнения, которые позволяют определить четыре коэффициента (ако, аК1, аК2, акз), задающие сплайн. С учетом значений этих коэффициентов выражение для сплайна (7.2) примет вид
 (7.4)
(7.4)
где 
Если функция задана только своими значениями (наиболее распространенный на практике случай), для задания значений на концах частного интервала [tK, tK+1] можно использовать следующее выражение:
 (7.5)
(7.5)
На границах интервала задания функции:
 (7.6)
(7.6)
В практике интерполяции сигналов и их характеристик наиболее удобной формой представления интерполирующей функции является следующая (разд. 6)
 (7.7)
(7.7)
где sk = s(tK) - дискретные значения сигнала (значения интерполируемой функции в узлах интерполяции).
Приводя выражения для сплайнов к виду (7.7), для случая tk+1 - tk= h, So= Sn= 0 получим:
на первом интервале
 (7.8)
(7.8)
где τ = t-tk/h,
на k-м интервале [tk, tk+1]
 (7.9)
(7.9)
на последнем интервале
 (7.10)
(7.10)
7.2. Кубические сплайны второй степени гладкости
Большую гладкость интерполяции обеспечивает кубический сплайн второй степени гладкости (дефекта 1). Он представляет многочлен третьей степени (7.2), его значения в узлах интерполяции равны значениям сигнала
 (7.11)
(7.11)
имеет в узлах интерполяции непрерывные первые две производные
 (7.12)
(7.12)
При описании сплайна на частном интервале [tk, tk+1] используется его запись в виде (7.7).
Чтобы выполнить условие (7.12), продифференцируем дважды (7.4) и для tk- левой границы интервала [tk, tk+1] (τ = 0) получим
 (7.13)
(7.13)
Аналогично для правой границы интервала [tk-h tk) (τ = 1) найдем
 (7.14)
(7.14)
Приравнивая (7.13) и (7.14), получаем
 (7.15)
(7.15)
Такие уравнения могут быть получены для узлов интерполяции при к = 2,..., N - 1. Полученная система уравнений должна быть дополнена соотношениями для производных на границах общего интервала [t0, tN], позволит однозначно определить все производные s’k. Таким образом, сплайн на каждом частном интервале определяется всей совокупностью значений sk и краевыми условиями. В этом смысле такой сплайн называется глобальным. Он требует большого объема вычислений, особенно при большом значении N.
Рассмотренные кубические сплайны дефекта 1 обладают достаточно хорошими интерполяционными свойствами. Однако синтез таких функций связан с определенными трудностями и для них характерен большой объем вычислений. Поэтому при интерполяции функций (восстановлении непрерывных сигналов по их дискретным значениям) более удобными могут оказаться локальные сплайны.
7.3. Подход к построению локальных сплайнов
Одним из достоинств сплайновой интерполяции является возможность решения задачи при неравномерной сетке интерполяции. Однако более простыми являются стационарные сплайны - сплайны, формируемые на равномерной сетке. На их примере и рассмотрим принцип построения локальных сплайнов.
Для построения локальных сплайнов могут использоваться различные подходы. В настоящем разделе дается достаточно простой, изложенный в [38]. Ограничимся рассмотрением случая, когда сплайны представляют степенные многочлены.
Рассмотрим функцию s(t), заданную своими значениями s(tk) = sк в точках дискретизации {tk},k = 0,1,2,...,N, на интервале [t0, tN]. Выделим интервал [Т1 Т2], границы которого: T1e[tk_1,tk] и T2e[tk,tk+1] (рис. 7.2). В окрестности точки T1 возьмем симметрично (N1+1) точек дискретизации tk-1 tk, tk-2, tk+1..., построим многочлен L1(t), проходящий через соответствующие значения функции sk.1, sk, sk_2, sk+1,... и содержащий (N1+1) членов.
Аналогично построим многочлен L2(t) на точках, выбранных симметрично Т2, проходящий через значения функции sk, sk+1 sk-1 sk+2,... содержащий (N2+1) членов.
На интервале [Т1, Т2] построим многочлен φk(t), содержащий N1+N2+3 членов.
Коэффициенты многочлена найдем из условий:
многочлен проходит через точки L1(T1), sk ,.L2 (Т2);

Рис. 7.2
производные многочлена на границах интервала совпадают с производным и L1(t) и L2(t):
 (7.16)
(7.16)
Уравнения, составленные исходя из условий (7.16), позволяют определить коэффициенты многочленаφk(t). Преобразовав его к виду (7.7), получим сплайн, описывающий функцию на интервале [Т1, Т2], имеющий требуемый вид.
Аналогично выделим интервал, примыкающий слева к [Т1, Т2] и на нем построим многочлен φk_1(t) так же, как строился φk(t). Затем на интервале, примыкающем справа к [Т1, T2], построим многочлен φk+1(t). Таким образом, получим совокупность многочленов на всем интервале задания функции, многочлены проходят через заданные точки, имеют определенное число производных на границах выделяемых интервалов. На первом интервале [to, Т1] и последнем [T2, tN] интерполирующая функция совпадает с многочленами L1(t) и L2(t) соответственно.
Используя изложенный подход к синтезу локальных сплайнов и обеспечивая заданное число непрерывных производных, можно получить различные виды сплайнов, описывающих заданную функцию.
7.4. Локальные сплайны нечетной степени гладкости
Ниже рассматривается метод синтеза локальных стационарных сплайнов, имеющих нечетное число непрерывных производных. Синтез сплайнов производится с использованием общего подхода, описанного в п. 7.3.
7.4.1. Локальные сплайны первой степени гладкости
Кусочно-линейная интерполяция не имеет большого практического значения. Чаще используются сплайны более высокого порядка. Однако на ее примере проще рассмотреть подход и основные особенности интерполяции на основе локальных сплайнов.
Функция, описывающая сигнал, задана дискретными значениями на интервале [t0, tN] с равномерной сеткой и постоянным шагом h (рис. 7.2).
Выделим интервал [Т1 Т2], где T1 = 0,5(tk + tk) и T2 = 0,5(tk + tk+1).
Определим значения функций L1(t) и L2(t) и их первых производных на границах интервала [Т1, Т2] с использованием линейной интерполяции
 (7.17)
(7.17)
На интервале [Т1, Т2], построим степенной многочлен четвертой степени
 (7.18)
(7.18)
так, как это описано в п.7.3: на границах интервала значения многочлена и его первых производных совпадают со значениями, определяемыми (7.17), а в точке tk - значением sk

 (7.19)
(7.19)
Из (7.17) - (7.19) получим выражения для коэффициентов многочлена (7.18)
 (7.20)
(7.20)
Таким же образом можно построить многочлены φk(t) на всех
частных интервалах. На первом интервале и последнем функция восстанавливается линейно.
Преобразуя полученную совокупность многочленов {φ(t)} к виду

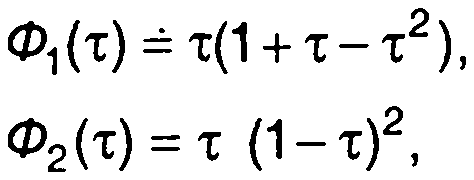
для базисных функций Фk(t) получим следующие выражения.
На первом интервале:
 (7.21)
(7.21)
На k-м интервале [tk-0,5h,tk +0,5h], k = 2,...,N-1, N≥3:
 (7.22)
(7.22)
На последнем интервале:
 (7.23)
(7.23)
Графики базисных функций приведены на рис. 7.3 - 7.5 (в конце раздела). Примеры восстановления непрерывных сигналов по их дискретным значениям с помощью степенных локальных сплайнов приведены на рис. 7.6 - 7.8 (интервал дискретизации - единица).
Сплайны с одной непрерывной производной являются наиболее простыми. Качество интерполяции функций с их использованием такое же, как и при использовании эрмитовых сплайнов. Оно может оказаться достаточным при интерполяции относительно простых зависимостей.
7.4.2. Локальные сплайны третьей степени гладкости
Используя общий подход, проведем построение локальных сплайнов третьей степени гладкости. Для этого выделим интервал [Т1 ,Т2], с границами на серединах смежных частных интервалов разбиения (рис. 7.2):

Через точки sk-2,...,sk+1 проведем многочлен L1(t) третьей степени. Выражение для него будет иметь вид:
 (7.24)
(7.24)
где τ = 1 / h( t - tk_1).
Для левой границы интервала [Т1, Т2], получим:
 (7.25)
(7.25)
Через точки sk-1,...,sk+2 проведем многочлен L2(t) третьей степени (аналогично многочлену L1(t). Так же, как для L1(t), получим зависимости для значения L2(t) и трех его производных на правой границе
интервала [T1, Т2], в точке tk+ 0,5h. Эти значения описываются (7.25) при увеличении индекса s на единицу.
В соответствии с общим подходом, изложенным в п.7.3, на интервале [T1,Т2], строится многочлен 8-й степени φk(t), N1=N2 = 3. Так же строятся многочлены на всех остальных интервалах. На первом и последнем интервалах для интерполяции используются многочлены L1(t) и L2(t), проведенные через первые и последние четыре точки соответственно. Полученная таким образом совокупность степенных сплайнов осуществляет интерполяцию функции на всем заданном интервале, плавно соединяя исходные дискретные значения. Преобразуя полученную совокупность многочленов к виду (7.7), получим следующие выражения для базисных функций Фk(t).
На первом интервале:
 (7.26)
(7.26)
На k-ом интервале [tk-0,5h, tk+0,5h], k = 3,...,N-2, N≥ 5:
 (7.27)
(7.27)
На последнем интервале базисные функции определяются
(7.26) с учетом следующих соотношений:
 (7.28)
(7.28)
Рассматриваемые сплайны могут быть получены только при N ≥ 4.
Графики базисных функций при некоторых значениях N изображены на рис. 7.3 - 7.5. Примеры восстановления непрерывных сигналов по их дискретным значениям с помощью степенных локальных сплайнов приведены на рис. 7.6 - 7.8.
7.5. Локальные сплайны четной степени гладкости
На основе общего подхода (п. 7.3) получим расчетные выражения для стационарных многочленных моделей, имеющих четное число непрерывных производных. Это наиболее простые локально- сплайновые модели.
7.5.1. Локальные сплайны второй степени гладкости
Функция, описывающая сигнал (или его характеристику), задана дискретными значениями на интервале [t0, tN] с постоянным шагом (рис. 7.2). Выделим частный интервал [tk, tk-1 ]и определим значения первых двух производных на границах выделенного интервала. Для этого проведем через точки sk-1,sk и sk+1 степенной многочлен второй степени
 (7.29)
(7.29)
Коэффициенты многочлена определяются из следующей системы функций:
 (7.30)
(7.30)
Из (7.29) с учетом (7.30) найдем производные на левой границе выделенного интервала:
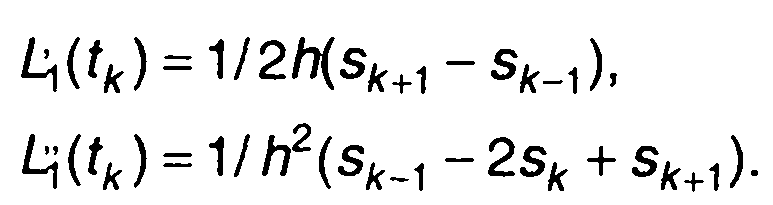 (7.31)
(7.31)
Аналогично построим степенной многочлен второй степени L2(t), проходящий через точки sk, sk+1, sk+2. Производные L2(t) на правой границе выделенного интервала найдутся так же, как (7.31): .
 (7.32)
(7.32)
Построим на интервале [tk, tk+1] степенной многочлен φk(t) пятой степени
 (7.33)
(7.33)
где τ = 1/h((t-tk), t ϵ [tk,tk+1], удовлетворяющий граничным условиям
 (7.34)
(7.34)
С учетом (7.34), (7.31) и (7.32) получим следующие выражения для коэффициентов многочлена (7.33):
 (7.35)
(7.35)
Аналогично получим всю совокупность многочленов {φk(t)}. На первом частном интервале и последнем функция описывается многочленами L1(t) и L2(t), проведенными через первые три и последние три точки. Преобразуя полученную совокупность многочленов к виду (7.7), получим следующие зависимости дли базисных функций Фk(t).
На первом интервале:
 (7.36)
(7.36)
На k-м интервале [tk,tk+1], k = 2,...,N-2, N≥ 4:
 (7.37)
(7.37)
На последнем интервале:
 (7.38)
(7.38)
Графики базисных функций при некоторых значениях N изображены на рис.7.3 - 7.5. Примеры восстановления непрерывных сигналов по их дискретным значениям с помощью степенных локальных сплайнов приведены на рис. 7.6 - 7.8.
7.5.2. Локальные сплайны четвертой степени гладкости
При переходе к сплайнам, имеющим непрерывными четыре первые производные, качество интерполяции (гладкость) улучшается. Принцип их построения описан в п. 7.3. Операции построения сплайна аналогичны описанным в п. 7.5.1.
Выделим интервал [tk, tk+1] (рис. 7.2), и на левой границе интервала через пять точек sk.2, sk-1,.., sk+2 степенной многочлен
 (7.39)
(7.39)
Приравнивая значения функции и многочлена (7.39) в выбранных точках, получаем следующие выражения для коэффициентов:
 (7.40)
(7.40)
Дифференцирование (7.39) с учетом (7.40) дает выражения для первых четырех производных на левой границе рассматриваемого интервала в виде:
 (7.41)
(7.41)
Аналогично задается степенной многочлен L2(t) на правой границе выделенного интервала, который проходит через точки sk-1,..,sk+3 . Для него получим:
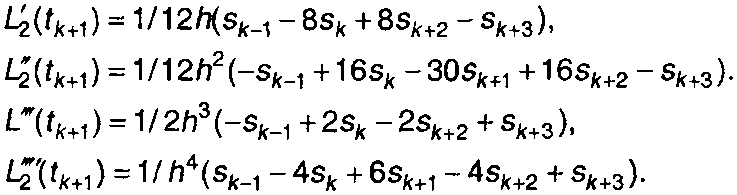 (7.42)
(7.42)
На интервале [tk, tk+1] строим степенной многочлен девятой степени
 (7.43)
(7.43)
где т = 1/h(t-tk).
Многочлен проходит через точки sk и sk+1, на границах интервала имеет производные, равные (7.41) и (7.42). Из этих условий определяются коэффициенты в (7.43):
 (7.44)
(7.44)
Аналогично строятся многочлены φk(t) на всех частных интервалах [tk, tk+1]при k = 3,...,N-2. На первом и последнем интервалах интерполируемая функция описывается многочленами L1(t), проходящим
через первые пять ее значений, и L2(t), проходящим через последние пять значений функции.
Преобразуя полученные многочлены к виду (7.7), получаем следующие выражения для базисных функций.
На первом интервале:
 (7.45)
(7.45)
На k-м интервале [tk,tk+1], k = 3,...,N-2, N≥ 6:
 (7.46)
(7.46)
На последнем интервале базисные функции симметричны функциям на первом интервале, вычисляются по (7.45) с учетом следующих соотношений:
 (7.47)
(7.47)
Рассматриваемые сплайны могут быть получены только при N > 5.
Графики базисных функций при некоторых значениях N изображены на рис. 7.3 - 7.5. Примеры восстановления непрерывных сигналов по их дискретным значениям с помощью степенных локальных сплайнов приведены на рис. 7.6 - 7.8.
Анализ приведенных на рис. 7.6 - 7.8 интерполяционных функций, построенных с использованием ряда Котельникова, многочленов Лагранжа и сплайновых функций, дает возможность сравнить качество интерполяции для различных видов исходных сигналов.

Рис. 7.3

Рис. 7.4

Рис. 7.5

Рис. 7.6

Рис. 7.7

Рис. 7.8
Раздел 8.
УЗКОПОЛОСНЫЕ СИГНАЛЫ
Узкополосные сигналы составляют широкий класс сигналов, которые формируются и обрабатываются в различных радиотехнических системах. Это прежде всего различные виды модулированных сигналов. Особенности структуры узкополосных сигналов определили возможность, а часто и необходимость, особого подхода к их описанию и анализу, а, следовательно, целесообразность их отдельного рассмотрения.
8.1. Описание узкополосного сигнала
К узкополосным сигналам относятся сигналы, спектры которых сосредоточены в относительно узкой по сравнению со средней частотой полосе (рис. 8.1,а). Узкополосный сигнал описывается выражением
 (8.1)
(8.1)
где V(t) , Ф(t) - амплитуда и фаза сигнала; ω0- несущая частота.
Амплитуда V(t) и фаза φ(t) содержат передаваемую информацию, являются функциями времени и представляют модулируемые параметры сигнала. Это медленно меняющиеся функции времени, их изменения за период 2π/ω0 незначительны, таким образом, выполняется условие узкополосности сигнала.
Дата добавления: 2015-12-16; просмотров: 882;