И ЭЛЕМЕНТЫ ТЕОРИИ НАПРЯЖЕНИЙ
 Для изучения движения сплошной среды в связи с причинами, которые это движение вызывают, вводят понятие о силах. Силы могут быть внешними и внутренними. Первые являются следствием воздействия на рассматриваемое тело других тел, а вторые возникают в результате взаимодействия элементов данного тела. Внешние и внутренние силы могут быть двоякого рода: объемные (или массовые) и поверхностные. Объемная сила действует на массу, заключенную в произвольном элементе объема тела, например сила тяжести.
Для изучения движения сплошной среды в связи с причинами, которые это движение вызывают, вводят понятие о силах. Силы могут быть внешними и внутренними. Первые являются следствием воздействия на рассматриваемое тело других тел, а вторые возникают в результате взаимодействия элементов данного тела. Внешние и внутренние силы могут быть двоякого рода: объемные (или массовые) и поверхностные. Объемная сила действует на массу, заключенную в произвольном элементе объема тела, например сила тяжести.
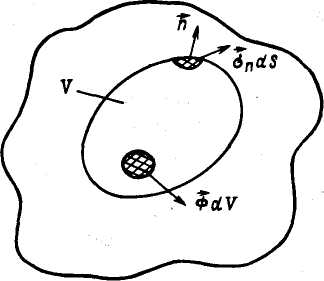
Рис. 4. Схема действия массовых и поверхностных сил в объеме V
Пусть  (x,t)— объемная сила, отнесенная к единице объема. Тогда сила, действующая на бесконечно малый объем dV, равна
(x,t)— объемная сила, отнесенная к единице объема. Тогда сила, действующая на бесконечно малый объем dV, равна
dV, а на объем V—равна  dV (рис. 1).
dV (рис. 1).
Поверхностная сила действует на элементы, которые можно мысленно выделить внутри тела или на его поверхности.
Сила, действующая на бесконечно малый элемент поверхности dS, равна  dS, где
dS, где  — вектор силы, рассчитанный на единицу площади элемента и приложенный в любой его точке, называется вектором напряжения или просто напряжением (см. рис. 1).
— вектор силы, рассчитанный на единицу площади элемента и приложенный в любой его точке, называется вектором напряжения или просто напряжением (см. рис. 1).
Напряжение зависит от положения элемента dS, т. е. от ориентировки его
в теле. Если требуется указать, что напряжение относится к площадке с нормалью п, то пишут  .
.
Проекции этого вектора на оси произвольной системы координат Ох1х2х3 обозначаются через σnj (j=1, 2, 3). В частности, проекции напряжений xi, отнесенные к площадкам, перпендикулярным к координатным осям Oxi, обозначаются через σij (i,j = 1,2,3), где σii называются нормальными напряжениями, а σij = σji (i≠j) — касательными напряжениями, действующими на этих площадках (рис. 5). Легко доказать следующие очень важные соотношения:
σnj = 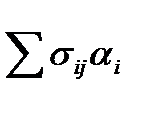 ( i, j = 1,2,3), (1.29)
( i, j = 1,2,3), (1.29)
которые позволяют найти компоненты вектора напряжения для произвольной площадки с нормалью  , проходящей через точку М; αi = cos(n, хi) (i = 1, 2, 3).
, проходящей через точку М; αi = cos(n, хi) (i = 1, 2, 3).
 Поэтому говорят, что совокупность шести величин σij, называемых компонентами симметричного тензора напряжений, полностью характеризует напряженное состояние в точке тела М.
Поэтому говорят, что совокупность шести величин σij, называемых компонентами симметричного тензора напряжений, полностью характеризует напряженное состояние в точке тела М.
| Рис. 5. Расположение компонент тензора напряжений относительно выбранной декартовой системы координат |
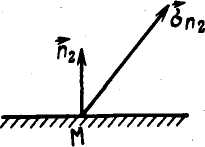
| Рис. 6. Векторы напряжений в точке М, действующие в двух произвольно ориентированных площадках |
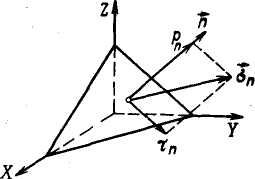
Рис. 7. Нормальная и касательная проекции вектора напряжения 
Пусть заданы две площадки, проходящие через одну и ту же точку М (рис. 6). Используя формулу (1.29), нетрудно доказать, что проекция напряжения  , действующего на первую площадку, на нормаль
, действующего на первую площадку, на нормаль  ко второй равна проекции напряжения
ко второй равна проекции напряжения  , действующего на вторую площадку, на нормаль
, действующего на вторую площадку, на нормаль  к первой и вычисляется по формуле
к первой и вычисляется по формуле
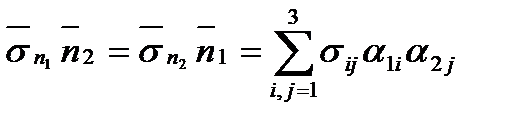
 (1.30)
(1.30)
где α1i и α2j — направляющие косинусы нормалей и . Эта формула позволяет вычислить проекцию на любое направление вектора напряжения, действующего на данную площадку. В частности, проектируя вектор на направление нормали, получаем нормальное напряжение (рис. 7)
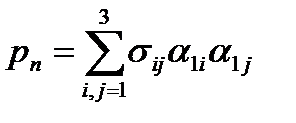 (1.31)
(1.31)
Касательное напряжение на этой же площадке равно
 (1.32)
(1.32)
где σn — величина вектора напряжения .
Из формулы (1.30) следуют формулы перехода от одной системы Ох1х2х3 координат к другой О 

 ;
;
 (1.33)
(1.33)
где σ'кr — компоненты тензора напряжений относительно новой системы координат;
αкi = cos(  ), αrj = cos(
), αrj = cos(  ).
).
Например, зависимость между напряжениями в декартовой (Ох1х2х3) и цилиндрической (r, θ, z) системах координат с общей осью Ox3 = Oz имеет вид
σrr = σ11cos2θ + σ22 sin2θ + σ12 sin 2θ;
σθθ= σ11 sin2θ + σ22 cos2θ - σ12 sin 2θ;
σzz = σ33; (1.34)
σrθ =  ( σ22 - σ11)sin 2θ + σ12 cos2θ;
( σ22 - σ11)sin 2θ + σ12 cos2θ;
σrz = σ13 cosθ + σ23sin θ;
σθz= - σ13 sinθ + σ23 cosθ;
где σrr—радиальное напряжение, действующее на площадке, перпендикулярной к радиусу; σθθ — тангенциальное (окружное) напряжение, действующее на площадке, нормаль которой перпендикулярна к радиусу.
Принимая во внимание известные соотношения аналитической геометрии
из формул (1.33) после суммирования левой и правой частей по к (при r = к) получается важное соотношение
 (1.35)
(1.35)
Оно показывает, что величина σ, называемая средним нормальным напряжением, инвариантна по отношению к преобразованию системы координат.
Характерной особенностью напряженного состояния сплошной среды является наличие в каждой точке тела, по крайней мере, трех взаимно перпендикулярных площадок, на которых касательные напряжения σij (i≠j) равны нулю. Направления нормалей к этим площадкам образуют главные направления, которые не зависят от исходной системы координат. Соответствующие напряжения σii=σi называются главными нормальными напряжениями. Поэтому любое напряженное состояние в рассматриваемой точке может быть вызвано растяжением (сжатием) окрестности точки в трех взаимно перпендикулярных направлениях.
Главные нормальные напряжения могут быть найдены из следующего кубического уравнения:

корни этого уравнения могут быть только вещественными.
Так как решения этого уравнения хi = σi (i=1,2,3) не зависят от выбора системы координат, коэффициенты σ, А, В также не должны зависеть, т. е. они инвариантны. Это еще одно доказательство инвариантности среднего напряжения
 (1.36)
(1.36)
Два других инварианта физического смысла не имеют.
 (1.37)
(1.37)
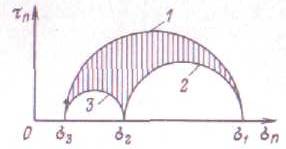
Рис. 8. Диаграмма Мора:
/, 2, 3 — окружности, координаты которых определяют нормальные и касательные напряжения на площадках, проходящих через главные оси 1, 2, 3 соответственно
Если главные направления совпадают с координатными осями (Охi), то формулы (1.31) — (1.34) упрощаются. Например, формулы (1.31) и (1.32) принимают вид
 (1.38)
(1.38)
где αi= cos (n, xi).
Отсюда нетрудно получить, что напряжения рп и τn могут лежать только внутри области, заштрихованной на рис.8. Это так называемая диаграмма Мора, дающая наглядное представление о напряжениях в различных сечениях, проходящих через данную точку. Здесь принята нумерация главных осей такой, чтобы выполнялись условия
σ1 ≥ σ2 ≥ σ3 (1.39)
Практический интерес представляют сечения, проходящие через главные оси. На рис. 8 точкам какой-либо окружности 1, 2 или 3 отвечают площадки, содержащие соответствующую главную ось.
Если площадка содержит главную ось Ox1 и наклонена под углом θ к оси Ох2, то из формул (1.38) получается
Эти напряжения соответствуют координатам точек окружности № 1 (см. рис. 8).
По аналогии можно записать формулы для напряжений, действующих на площадках, проходящих через две другие главные оси, иначе, для координат точек окружностей № 2 и 3 на рис. 8.
При θ = π/4, т. е. в сечениях, делящих пополам углы между главными плоскостями, касательные напряжения принимают экстремальные значения
называемые главными касательными напряжениями, а нормальные напряжения равны полусуммам
что соответствует координатам центров окружностей 1, 2 и 3 (см. рис. 8). Наибольшее из значений τi (i = 1, 2, 3) называется максимальным касательным напряжением и обозначается τmax. Если условия (1.39) выполняются, то τmax = τ2.
Так как различные тела обладают различными механическими свойствами по отношению к сдвигу и равномерному всестороннему сжатию, удобно компоненты тензора напряжения представить в виде суммы
где Sij—компоненты тензора, характеризующего касательные напряжения в данной точке и называемого девиатором напряжений.
Нормальные составляющие девиатора обозначают Sii = σii — σ, а касательные составляющие sij = σij (i≠j).
Главные направления девиатора напряжений (Sij) и тензора напряжений (σij) совпадают, а главные значения si отличаются от σi, на величину среднего (гидростатического) давления и определяются кубическим уравнением
-s3 + A1s+B1=0,
все корни которого также вещественны.
Инварианты A1 и В1 легко получить из формул (1.37), если заменить σij на sij и σi на si.
Неотрицательную величину

 (1.40)
(1.40)
называют интенсивностью касательных напряжений.
Часто рассматривают приведенное напряжение или интенсивность напряжений
 (1.41)
(1.41)
Величина Т равна нулю только в том случае, когда напряженное состояние есть состояние гидростатического давления.
Доказывается, что с погрешностью не более 7% имеет место равенство
Т ≈ 1,08 τmax.
Для характеристики вида напряженного состояния, подобно характеристике деформационного состояния, используется параметр, введенный Лоде и Надаи:
который изменяется в пределах от —1 до +1. Он указывает на взаимоотношение главных нормальных напряжений, в частности на положение точки σ2 на диаграмме Мора. Для одних и тех же величин μσ диаграммы Мора подобны.
Для чистого растяжения элемента (σ1>0, σ2= σ3 = 0) μσ= —1, для чистого сжатия (σ1 = σ2 = 0, σ3<0) μσ= 1, для сдвига (σ1>0, σ2=0, σ3= — σ1) μσ= 0, для гидростатического давления (σ1 = σ2 = σ3) μσ не имеет смысла.
§ 4. Источник и сток в пространстве.
| дs |
| (1) |
| (2) |
Рассмотрим еще один важный для дальнейшего пример потенциального течения. Пусть
 (1.42)
(1.42)
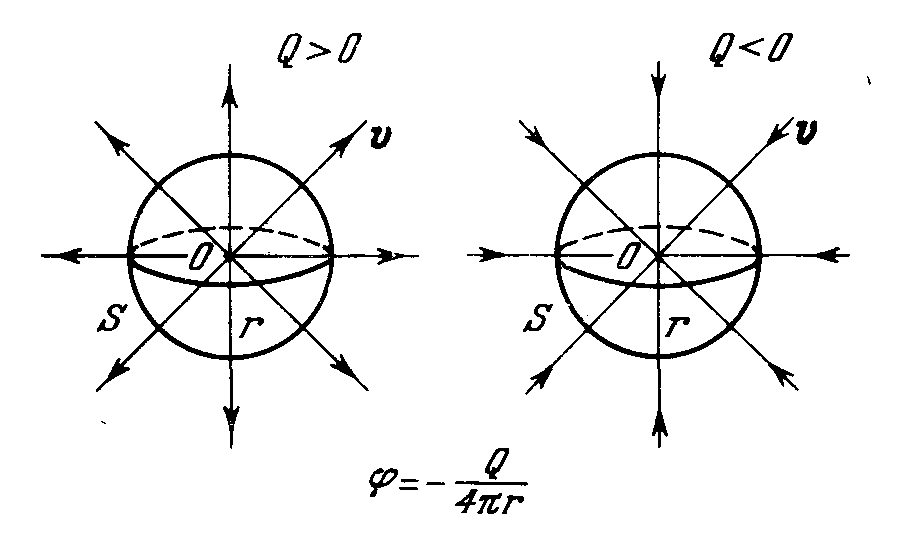
где  , a Q = const или Q = Q (t). Ясно, что поверхностями равного потенциала j = const являются в этом случае поверхности r = const, т. е. концентрические сферы с центром в начале координат. Скорость v = grad j ортогональна к этим сферам, т. е. направлена по радиусам. Линии тока являются лучами, выходящими из начала координат.
, a Q = const или Q = Q (t). Ясно, что поверхностями равного потенциала j = const являются в этом случае поверхности r = const, т. е. концентрические сферы с центром в начале координат. Скорость v = grad j ортогональна к этим сферам, т. е. направлена по радиусам. Линии тока являются лучами, выходящими из начала координат.
Пусть Q > 0; тогда, так как grad j направлен в сторону роста j, то v направлена по r. Если Q < 0, то v направлена по - r (рис. 6). Величина скорости равна:
|(grad jr)| =  .
.
Рис. 6
Скорость стремится к нулю при r ® ¥ и к бесконечности при r ® 0. Точки нуль и бесконечность являются критическими. При Q > 0 (1) имеем
вытекание жидкости из начала координат во всех направлениях — это течение называется точечным пространственным источником. При Q < 0 (2) — втекание жидкости в начало координат — сток. В первом случае в бесконечно удаленной точке имеем источник, а во втором — сток.
Вычислим объем жидкости, протекающей за единицу времени через поверхность сферы S некоторого радиуса r с центром в начале координат. Через элемент сферы ds за единицу времени протекает объем жидкости v ds, а через всю сферу
 (расход жидкости)
(расход жидкости)
( v можно вынести за знак интеграла, так как v = const на поверхности сферы). Заметим, что первые два равенства верны всегда, когда v = v (r) и v ортогональна к поверхности сферы S. Вычисленный объем жидкости не зависит от r. Таким образом, несмотря на то, что на разных сферах разного радиуса с центром в начале координат скорости разные, постоянная Q в потенциале j (1.42) является объемом жидкости протекающей за единицу времени через каждую такую сферу. Величина Q называется расходом или мощностью источника (стока).
Если Q = const, то источник или сток имеет постоянную мощность; если Q = Q (t) — то переменную. Если в некоторый момент времени Q меняется в начале координат, то мгновенно измеряется поле скоростей во всем пространстве. Сигналы изменение Q сразу сказываются на всем поле скоростей, что, конечно, не может иметь места в действительности. Возмущения должны распространяться с некоторой конечной скоростью. Поэтому рассмотренное поле скоростей является определенной идеализацией, которая может достаточно хорошо отражать действительность только в том случае, когда рассматриваются течения жидкости с большой скоростью распространения возмущений. Во многих случаях можно считать, что такой жидкостью является, например, вода, в которой скорость распространения слабых возмущений 1450 м/сек.
2. (4) Уравнения механики сплошных сред
§ 1. УРАВНЕНИЕ НЕРАЗРЫВНОСТИ
Один из фундаментальных законов ньютоновской механики материальных тел—это закон сохранения массы т любого индивидуального объема, т. е. объема, состоящего из одних и тех же частиц среды. Этот закон заключается в том, что для любого индивидуального объема т = const или в иной форме
В механике сплошных сред почти всегда вместо массы рассматривается плотность ρ.
Для малого объема верно равенство Δm ≈ ρΔV, а для конечного объема — равенство  , где интеграл взят по подвижному индивидуальному объему V.
, где интеграл взят по подвижному индивидуальному объему V.
Тогда закон сохранения массы т принимает вид
 (2.1)
(2.1)
Здесь не только плотность ρ — функция от координат точек пространства и времени, но и объем V зависит от t. Принимая это во внимание при вычислении производной в равенстве (2.1), несложно получить равенство
и так как оно справедливо для любого индивидуального объема, то получим первое основное дифференциальное уравнение механики сплошной среды
 (2.2)
(2.2)
которое называется уравнением неразрывности в переменных Эйлера. Это уравнение накладывает ограничение на скорость точек сплошной среды и применяется при больших перемещениях точек среды.
Если воспользоваться формулой (1.5), то уравнение (2.2) можно переписать в виде
 (2.3)
(2.3)
В цилиндрической системе координат (r, Θ, z) при осевой симметрии  = (r, z) уравнение неразрывности принимает вид
= (r, z) уравнение неразрывности принимает вид

Интересно, что уравнение (2.3) легко получить сразу, оставаясь строго на точке зрения Эйлера. Для этого достаточно рассмотреть поток вектора ρ сквозь некоторую неподвижную замкнутую поверхность S произвольной формы. Нам известно [см. формулу (1.10)], что этот поток может быть представлен в виде
Он выражает массу среды, вытекающую за единицу времени из замкнутой поверхности S. Так как это повлечет за собой уменьшение плотности внутри S в единицу времени, равное (- dρ/dt), и соответственно изменение массы среды внутри S, равное
 то
то 
Отсюда следует уравнение (2.3).
Для несжимаемой жидкости dρ/dt (хотя ∂ρ/∂t≠0),уравнение неразрывности (2.2) приобретает вид
div = 
В этом случае поток скорости через любую неподвижную замкнутую поверхность равен нулю, т. е. объем втекающей жидкости равен объему вытекающей. Применяя это свойство к замкнутой поверхности, образованной трубкой тока и ее нормальными сечениями, получим
v1S1=v2S2 .
Конечно, не существует сред, в строгом смысле действительно несжимаемых, однако весьма часто в инженерной практике предположение о постоянстве ρ приводит к значительному упрощению задачи и почти не вносит ошибки.
Для стационарных движений ∂ρ/∂t = O, уравнение неразрывности получает вид
div ρ = 0или 
Уравнение (2.2) или (2.3) справедливо для любой однородной сплошной среды, когда нет поглощений массы, химических реакций, внутренней диффузии и других процессов, связанных с влиянием окружающих тел. Однако оно легко обобщается для многокомпонентных смесей или многофазных сред с учетом различного взаимного влияния компонентов (или фаз).
Для этого всякий индивидуальный объем можно представить как совокупность п континуумов, каждый из которых имеет свою плотность ρ1, ρ2, ..., ρn и свою скорость  ,
,  , …,
, …,  . Если в смеси не происходит химических реакций и других процессов взаимных превращений, то для каждого компонента смеси должен выполняться закон сохранения массы
. Если в смеси не происходит химических реакций и других процессов взаимных превращений, то для каждого компонента смеси должен выполняться закон сохранения массы
 или
или 
Если же в смеси происходят химические реакции, то массы компонентов тi могут меняться. Пусть γi — изменение массы тi i-го компонента смеси в единицу времени на единицу объема за счет химической реакции. Тогда уравнение неразрывности для компонента смеси можно записать в виде
 или
или  (2.4)
(2.4)
Согласно закону сохранения общей массы при химических реакциях имеем
 (2.5)
(2.5)
Кроме п плотностей и п скоростей для компонентов смеси можно ввести одну плотность ρ и одну скорость смеси как целого.
Для этого достаточно просуммировать уравнения (2.4), учесть (2.5) и получим следующие равенства
В результате уравнение неразрывности примет обычный вид (2.3) относительно средних характеристик среды.
Все сказанное остается в силе, если вместо химических реакций в многокомпонентных смесях рассматриваются процессы взаимных поглощений (или выделений) в многофазных средах. В этом случае в формуле (2.4) γi — интенсивность поглощения i-той фазы среды.
§ 2. УРАВНЕНИЯ ДВИЖЕНИЯ И РАВНОВЕСИЯ
Известно, что основным динамическим уравнением движения материальной точки является второй закон Ньютона ma = R, a широко используемыми следствиями этого закона являются следующие общие теоремы движения системы материальных точек:
а) производная по времени от количества движения
системы равна сумме всех действующих на систему внешних сил 
 (2.6)
(2.6)
и называется уравнением количества движения или уравнением импульсов:
 (2.6')
(2.6')
б) производная по времени от кинетического момента
системы относительно какого-либо неподвижного центра О равна сумме моментов  всех внешних сил, действующих на систему, относительно того же центра, т. е.
всех внешних сил, действующих на систему, относительно того же центра, т. е.
 (2.7)
(2.7)
называется уравнением моментов количества движения или просто
Дата добавления: 2015-12-11; просмотров: 823;