Анализ основного математического аппарата расчета приводов
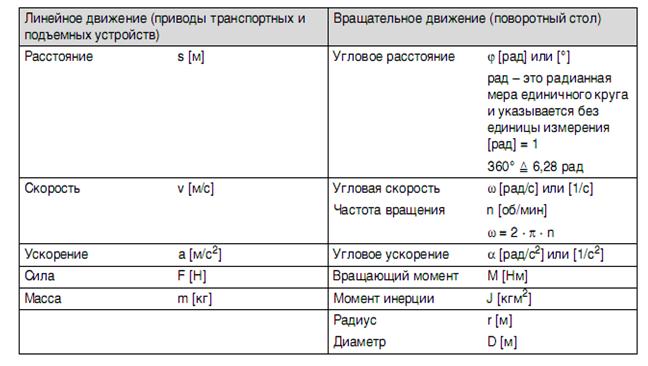
В работе приводных систем можно выделить три основных вида движения (Таблица 3.2)
Таблица 3.2 - Три основных вида движения
Составим основные уравнения движения и выявим основные функции вычисления (рисунки 3.6 – 3.8).

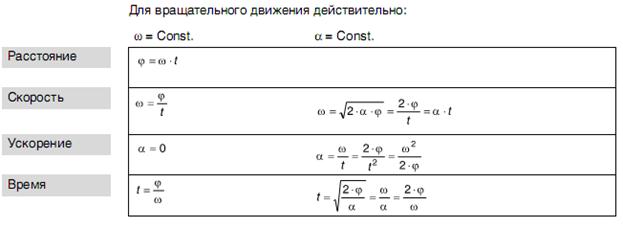
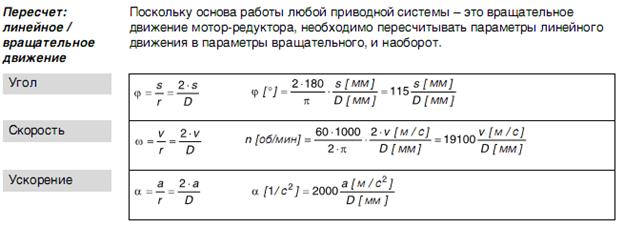
Рисунок 3.6 – Основные формулы расчета параметров привода
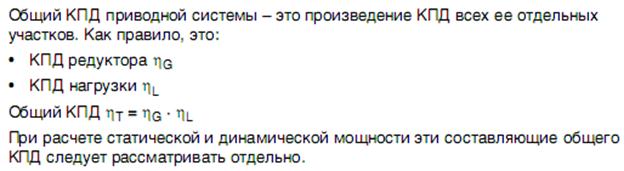
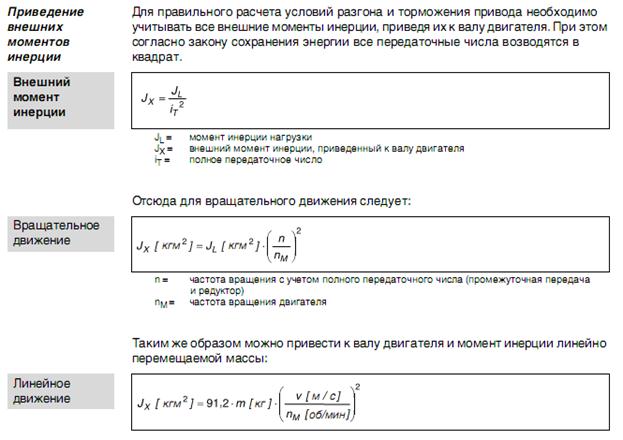
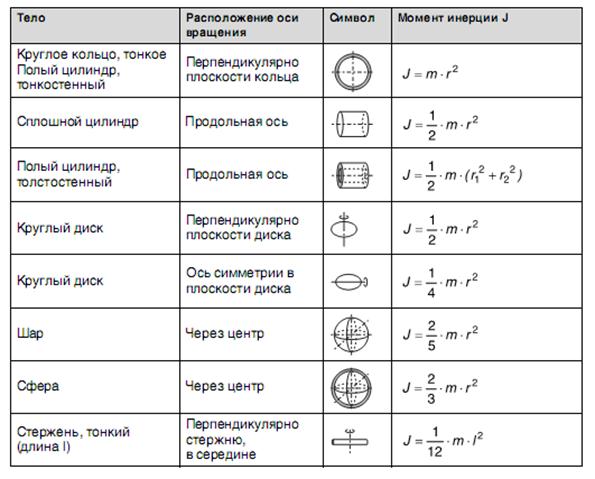
Рисунок 3.7 – Основные формулы расчета моментов инерции
Мощность

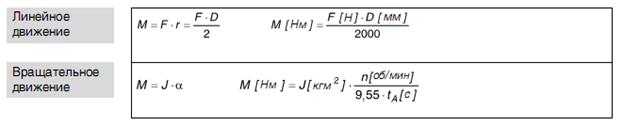
Рисунок 38 – Основные формулы вычисления момента вращения и мощности
Предварительный выбор электродвигателя осуществляется, исходя из соотношения [1]:
 , (3.1)
, (3.1)
где ξ - коэффициент запаса, выбирается согласно заданному режиму работы (Приложение Б),
Mн – момент нагрузки (задан в технических требованиях по вариантам)
nн – частота вращения выходного вала редуктора (задана)
η – КПД.
По вычисленному значению мощности двигателя, заданному в техническом задании по варианту роду тока и уровню напряжения, параметрам двигателя (скорости вращения выходного вала, температуры эксплуатации и т.д.) из справочника по двигателям выбираем подходящий двигатель с максимально близкими техническими характеристиками мощности к вычисленной.
Таблица 3 - Паспортные данные двигателя
| Напряжение питания | |
| Частота питающего напряжения | |
| Род тока | |
| Номинальная мощность | Nдвиг |
| Номинальные момент | Mн |
| Пусковой момент | Mп |
| Частота вращения выходного вала | nдвиг |
| Момент инерции ротора | Jр |
| Температура окружающей среды | |
| Диаметр выходного вала | Øвала |
| Реверс (да, нет) | |
| Масса | |
| Габаритные размеры | |
| Безотказность | |
| Быстродействие | |
| Точность и др. |
Дата добавления: 2015-12-11; просмотров: 2087;