Функциональная модель и функциональная схема МС
Для описания основных функций системы, их взаимосвязей, входных, выходных, промежуточных данных и объектов очень удобно формировать функциональные модели. они также необходимы на этапе согласования с заказчиком всех необходимых функций и связей системы.
Для функционального моделирования используют два основных метода: SADT и UML. Для реализации автоматизированного функционального моделирования используется специальное программное обеспечение – CASE средства. Методология SADT представляет собой совокупность методов, правил и процедур, предназначенных для построения функциональной модели объекта какой-либо предметной области. Функциональная модель SADT отображает функциональную структуру объекта, т.е. производимые им действия и связи между этими действиями. Основные элементы этой методологии основываются на следующих концепциях:
графическое представление блочного моделирования;
строгость и точность. Выполнение правил SADT требует достаточной строгости и точности, не накладывая в то же время чрезмерных ограничений на действия аналитика. Правила SADT включают:
а) ограничение количества блоков на каждом уровне декомпозиции;
б) связность диаграмм;
в) уникальность меток и наименований;
г) синтаксические правила для графики;
д) разделение входов и управлений.
е) отделение организации от функции.
В терминах IDEF0 процедура представляется в виде комбинации функциональных блоков и дуг. Блоки используются для представления функций, составляющих процедуру, и сопровождаются текстами на естественном языке.
Дуги представляют множества объектов, таких как физические объекты, информация или действия, которые образуют связи между функциональными блоками. Место соединения дуги с блоком определяет тип интерфейса.
Управляющие, регламентирующие или нормативные данные входят в блок сверху. Исходные данные (материалы и документы), которые обрабатываются при выполнении данной функции, отображаются с левой стороны блока.
Результаты выполнения функции отображаются с правой стороны. Механизм-специалист, который осуществляет операцию, изображается дугой, входящей в блок снизу
В данной работе разработана функциональная модель мехатронного модуля управления подачи токарного станка с использованием специализированного пакета BPWin. На рисунке 2.4 показана диаграмма нулевого уровня функциональной модели.
Основной функцией в модели системы является «Управление приводами подачи станка HOESCH D1000». Для реализации этой функции были определены входные, выходные данные, нормирующие документы и управляющие механизмы.
Входными объектами и данными являются:
- длина перемещения по оси Х;
- длина перемещения по оси Z;
- алгоритм обработки детали;
- сигнал «Старт».
Выходными объектами и данными являются:
- сигналы о состоянии двигателей подачи;
- сигналы концевых датчиков;
- аварийные сигналы.
Нормирующими документами являются:
- ГОСТЫ и СТП ОАО «АвтоВАЗ»;
- техническая документация на станок HOESCH D1000;
- техническое задание на изделие.
Управляющие механизмы:
- оператор станка, программист, ремонтник.
На рисунке 2.5 показана диаграмма первого уровня функциональной модели.
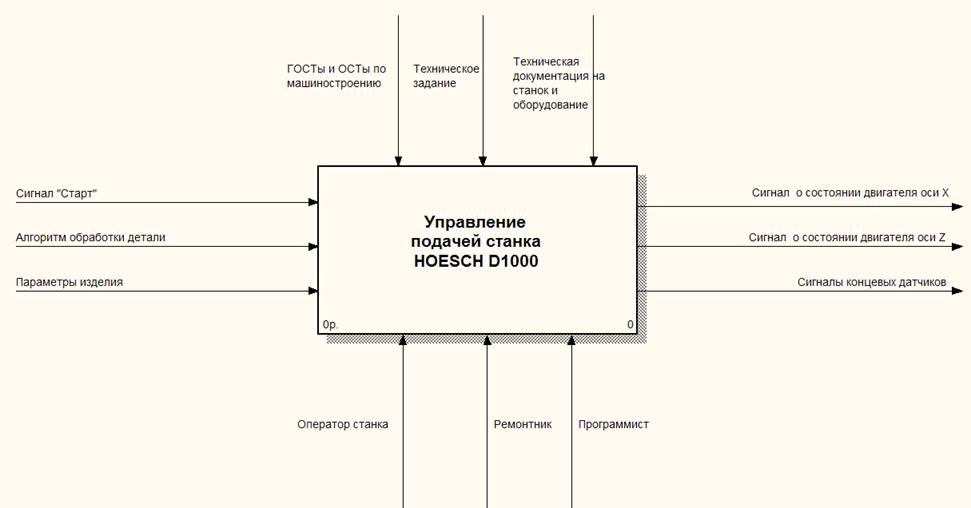
Рисунок 2.4 - Диаграмма нулевого уровня функциональной модели
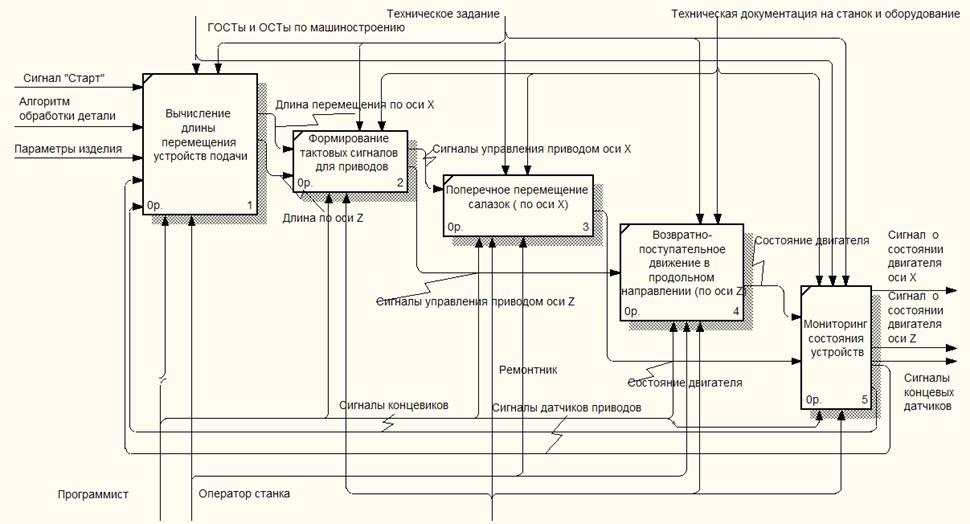
Рисунок 2.5 - Диаграмма нулевого уровня функциональной модели
После функциональной модели строится функциональная схема. Общий принцип построения функциональной схемы ММ показан на рисунке 2.6.
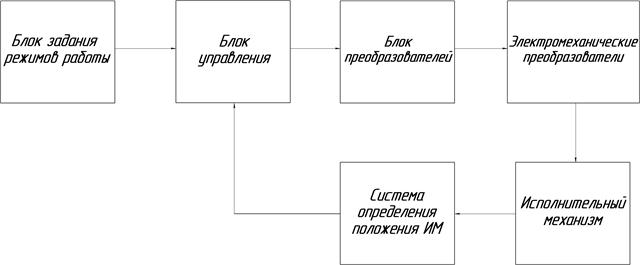
Рисунок 2.6 – Обобщенная функциональная схема ММ
Рассмотренная функциональная схема ММ, представленная как "черный ящик" имеет два информационных входа (программу движения и информационную обратную связь). Следовательно, в общем случае функциональная схема может быть определена как информационно-механический преобразователь.
На основе функциональных моделей и схем строятся структурные схемы. на начальном этапе строится обобщенная структурная схема. На рисунке 2.7 показана обобщенная структурная схема подсистемы управления приводом подачи станка с салазками.
Далее строится детальная структурная схема МС. На рисунке 2.8 показана детальная структурная схема подсистемы управления приводом подачи станка с салазками. На рисунке 2.9 показана детальная структурная схема мехатронной системы на базе сварочного робота.
Далее каждый модуль системы может быть детализирован в структурную схему.
Рисунок 2.7 - Обобщенная структурная схема подсистемы управления приводом подачи станка с салазками
Для физической реализации интерфейсов (информационно-механического преобразования) необходим внешний энергетический источник.
Для этой цели в основном используются электрические источники энергии. Введя соответствующие электроэнергетические преобразования, получаем функциональное представление мехатронной системы, содержащие функциональные преобразователи МС, связанных энергетическими и информационными потоками.
Рисунок 2.8 - Детальная структурная схема подсистемы управления приводом подачи станка с салазками
Рисунок 2.9 - Детальная структурная схема МС на базе сварочного робота
Структурная схема мехатронного модуля включает следующие основные элементы:
- механическое устройство, которое является конечным звеном и выполняет заданное управляемое движение.
- электродвигатель (асинхронный или постоянного тока), который является электрическим элементом.
- силовой преобразователь, обычно состоящий из усилителя мощности, широтно-импульсного модулятора (ШИМ) и трехфазного инвертора (для асинхронных двигателей).
- цифроаналоговый преобразователь (ЦАП), реализующий функцию информационно-электрического преобразователя.
- устройство обратной связи и аналогово-цифровой преобразователь для организации электроинформационного преобразования.
- датчики обратной связи по положению и скорости выходного вала (например: фотоимпульсного типа) выполняющие функции механико-информационного преобразователя.
- компьютерное устройство управления движением (УКУ), функциональной задачей которого является информационное преобразование (обработка цифровых сигналов, цифровое регулирование, расчет управляющих воздействий, обмен данными с периферийными устройствами).
- интерфейсные устройства и модули.
В зависимости от физической природы входных и выходных переменных элемента эти интерфейсы в общем случае включают в себя конструктивные и аппаратно-программные компоненты.
Дата добавления: 2015-12-11; просмотров: 4209;