Составное (сложное) движение точки
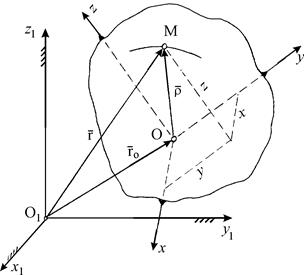
Составное движение точки - это движение, при котором точка одновременно участвует в нескольких движениях. Рассмотрим тело А (рис. 2.7), которое свободно движется по отношению к неподвижной системе координат О1x1y1z1. Пусть точка М совершает движение по поверхности этого тела. Через произвольную точку О движущегося тела проведем неизменно связанные с этим телом оси x,y,z. Систему осей Оxyz называют подвижной системой отсчета. Движение точки М по отношению к неподвижной системе отсчета называют ее абсолютным движением, которое характеризуется изменением ее радиуса-вектора  , абсолютной скорости
, абсолютной скорости  и абсолютного ускорения
и абсолютного ускорения  (по модулю и направлению).
(по модулю и направлению).
|
| Рис. 2.7. Составное движение материальной точки. |
Движение точки М по отношению к подвижной системе отсчета называют относительным движением точки, которое при неизменных радиусах-векторах и  характеризуется изменением только ее радиуса-вектора
характеризуется изменением только ее радиуса-вектора  , т.е относительной скоростью
, т.е относительной скоростью  и относительным ускорением
и относительным ускорением  в этой системе отсчета.
в этой системе отсчета.
Движение подвижной системы отсчета Оxyz и неизменно связанного с ней тела А по отношению к неподвижной системе отсчета О1x1y1z1 является для точки М переносным движением. Переносное движение точки М при неизменном по модулю радиусе-векторе характеризуется изменением радиусов-векторов и (по модулю и направлению) , переносной скоростью  и переносным ускорением
и переносным ускорением  точки М.
точки М.
Таким образом, для изучения относительного или переносного движения точки следует мысленно остановить соответственно переносное или относительное движение и определить далее характеристики движения точки по формулам кинематики точки в абсолютном движении. Если точка М участвует в составном движении, то имеют место следующие теоремы: абсолютная скорость точки равна геометрической сумме переносной и относительной скоростей точки, т. е.  =
=  +
+  ; абсолютное ускорение точки равно геометрической сумме переносного, относительного и кориолисова (поворотного) ускорений этой точки, т. е.
; абсолютное ускорение точки равно геометрической сумме переносного, относительного и кориолисова (поворотного) ускорений этой точки, т. е.  =
=  +
+  +
+  , или
, или  =
=  +
+  +
+  +
+  +
+  .
.
Кориолисово ускорение  равно удвоенному векторному произведению угловой скорости переносного вращения на относительную скорость точки, т. е.
равно удвоенному векторному произведению угловой скорости переносного вращения на относительную скорость точки, т. е.
=2×(  ´
´  ). Следовательно, модуль этого ускорения
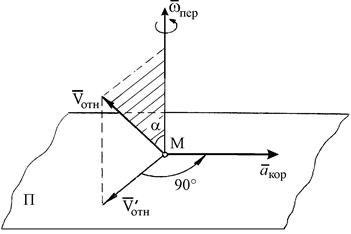
). Следовательно, модуль этого ускорения  =2×wпер ×Vотн ×sin a, где a - угол между векторами
=2×wпер ×Vотн ×sin a, где a - угол между векторами  и .Чтобы найти направление кориолисова ускорения
и .Чтобы найти направление кориолисова ускорения  точки М, достаточно в точке М построить векторы и
точки М, достаточно в точке М построить векторы и  и восстановить из этой точки перпендикуляр к плоскости, в которой лежат эти векторы и . Вектор направлен по этому перпендикуляру так, чтобы наблюдатель, смотрящий с конца этого вектора, видел поворот вектора на угол a против хода часовой стрелки до совмещения его с вектором
и восстановить из этой точки перпендикуляр к плоскости, в которой лежат эти векторы и . Вектор направлен по этому перпендикуляру так, чтобы наблюдатель, смотрящий с конца этого вектора, видел поворот вектора на угол a против хода часовой стрелки до совмещения его с вектором  (рис. 2.8).
(рис. 2.8).
|
| Рис. 2.8. Определение направление вектора кориолисова ускорения .
|
Направление вектора можно определить и другим способом (правило Н. Е. Жуковского): если провести через точку М плоскость П, перпендикулярную к вектору  и повернуть проекцию
и повернуть проекцию  относительной скорости
относительной скорости  на эту плоскость на 90° вокруг точки М в направлении переносного вращения, то получим направление вектора (рис. 2.8).
на эту плоскость на 90° вокруг точки М в направлении переносного вращения, то получим направление вектора (рис. 2.8).
Вопросы для самоконтроля
1. Что понимается под составным (сложным) движением точки?
2. Что называется абсолютным, переносным и относительным движением точки?
3. Сформулируйте, что такое переносная скорость и переносное ускорение точки.
4. В чем заключается теорема об абсолютной скорости точки, совершающей составное движение.
5. Сформулируйте теорему об ускорении точки в составном движении.
6. Как определить модуль и направление кориолисова ускорения точки?
7. В каких случаях ускорение Кориолиса равно нулю?
Дата добавления: 2015-12-08; просмотров: 1656;