Произвольная пространственная система сил
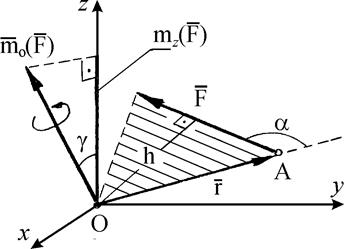
Моментом силы  относительно центра О называется приложенный в этом центре вектор
относительно центра О называется приложенный в этом центре вектор  , модуль которого равен произведению модуля силы на ее плечо h. Момент силы направлен перпендикулярно плоскости, проходящей через центр О и линию действия силы в ту сторону, откуда “вращение”, совершаемое силой вокруг точки О, представляется происходящим против хода часовой стрелки (рис. 9):
, модуль которого равен произведению модуля силы на ее плечо h. Момент силы направлен перпендикулярно плоскости, проходящей через центр О и линию действия силы в ту сторону, откуда “вращение”, совершаемое силой вокруг точки О, представляется происходящим против хода часовой стрелки (рис. 9): 
Момент силы относительно центра О может быть представлен в виде векторного произведения:  где
где  - радиус-вектор точки приложения силы, так как модуль векторного произведения равен
- радиус-вектор точки приложения силы, так как модуль векторного произведения равен 
 Вектор направлен перпендикулярно плоскости, проходящей через векторы и , в ту сторону, откуда кратчайший поворот вектора к направлению вектора представляется происходящим против хода часовой стрелки.
Вектор направлен перпендикулярно плоскости, проходящей через векторы и , в ту сторону, откуда кратчайший поворот вектора к направлению вектора представляется происходящим против хода часовой стрелки.
Моментом силы относительно оси z, проходящей через центр О, называется скалярная величина, равная проекции вектора  на эту ось:
на эту ось: 
 . Механический смысл величины
. Механический смысл величины  состоит в том, что она характеризует вращательный эффект силы, когда эта сила стремится повернуть тело вокруг оси z. В самом деле, если разложить силу на составляющие
состоит в том, что она характеризует вращательный эффект силы, когда эта сила стремится повернуть тело вокруг оси z. В самом деле, если разложить силу на составляющие  и
и  , где úú Oz (рис. 10 а), то поворот вокруг оси z будет совершать только составляющая и вращательный эффект всей силы будет определяться величиной
, где úú Oz (рис. 10 а), то поворот вокруг оси z будет совершать только составляющая и вращательный эффект всей силы будет определяться величиной  Составляющая же повернуть тело вокруг оси z не может, она лишь может сдвинуть тело вдоль оси z.
Составляющая же повернуть тело вокруг оси z не может, она лишь может сдвинуть тело вдоль оси z.
|
| Рис. 1.9. Определение момента силы относительно центра О.
|
Момент силы относительно оси z будет иметь знак “плюс”, когда с положительного конца этой оси поворот, который стремится совершить сила  вокруг этой оси, виден происходящим против хода часовой стрелки, и знак “минус” - когда по ходу часовой стрелки. Для расчета момента какой-либо силы относительно какой-либо оси z (рис. 1.10б) нужно провести любую плоскость (ху), перпендикулярную к данной оси и, спроектировав силу на эту плоскость, найти алгебраическую величину момента полученной проекции
вокруг этой оси, виден происходящим против хода часовой стрелки, и знак “минус” - когда по ходу часовой стрелки. Для расчета момента какой-либо силы относительно какой-либо оси z (рис. 1.10б) нужно провести любую плоскость (ху), перпендикулярную к данной оси и, спроектировав силу на эту плоскость, найти алгебраическую величину момента полученной проекции  относительно точки О пересечения оси z с плоскостью ху по формуле:
относительно точки О пересечения оси z с плоскостью ху по формуле: 
 . Поэтому момент силы относительно оси равен нулю, когда угол
. Поэтому момент силы относительно оси равен нулю, когда угол  =0, т.е. сила параллельна оси z или, когда линия действия силы пересекает эту ось.
=0, т.е. сила параллельна оси z или, когда линия действия силы пересекает эту ось.
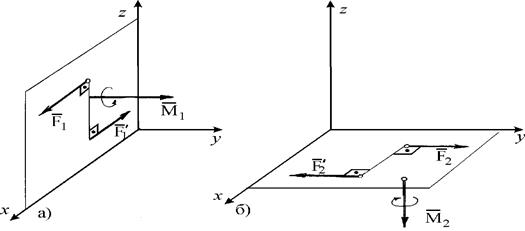
При изучении равновесия произвольной пространственной системы сил приходится определять моменты пар сил относительно осей в виде вектора, направленного по перпендикуляру к плоскости действия пары в ту сторону, откуда вращение тела этой парой сил представляется происходящим против направления вращения часовой стрелки. Изображенные на рис.1.11, а и б векторы  и
и  представляют собой соответственно моменты пар сил
представляют собой соответственно моменты пар сил  и
и  .
.
Так как пару сил можно переносить в ее плоскости действия и в любую другую плоскость, ей параллельную, то ее момент  не имеет определенной точки приложения и является свободным вектором, который можно переносить параллельно самим себе в любую точку тела.
не имеет определенной точки приложения и является свободным вектором, который можно переносить параллельно самим себе в любую точку тела.
а) 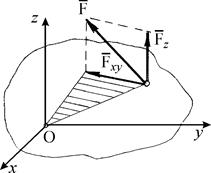
| б) 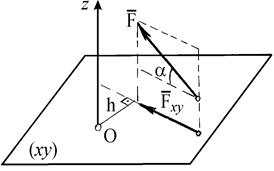
|
Рис. 1.10. Определение момента силы  относительно оси z, проходящей через центр О (а) и схема его расчета (б). относительно оси z, проходящей через центр О (а) и схема его расчета (б).
|
При определении момента пары сил относительно какой-либо оси достаточно найти его проекцию этого вектора этой пары на данную ось, например, на рис. 1.11а и б, величины М1х = М1z = 0; М1у = М1; М2х = М2у = 0; М2z = - M2.
|
| Рис. 1.11. Определение момента пары сил как вектора. |
Для сложения пар сил достаточно перенести их моменты как свободные векторы (параллельно самим себе) в общую точку и применить правило сложения векторов. Так, на примере двух пар сил  и
и  , расположенных в плоскостях xBy и xBz соответственно (рис. 1.12),выполняется соотношение:
, расположенных в плоскостях xBy и xBz соответственно (рис. 1.12),выполняется соотношение:  Модуль М результирующего вектора находится как величина диагонали прямоугольника, построенного на векторах
Модуль М результирующего вектора находится как величина диагонали прямоугольника, построенного на векторах  и
и  :
:  или в проекциях на координатные оси: Mx = M1x + M2x = 0; My = M1y + M2y =- M2;
или в проекциях на координатные оси: Mx = M1x + M2x = 0; My = M1y + M2y =- M2;
Mz = M1z + M2z = M1, следовательно, 
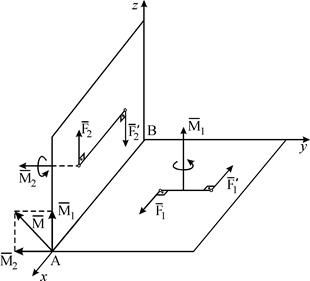
Рис. 1.12. Сложение моментов пар сил.
Любую пространственную систему сил можно привести к некоторому центру О с главным вектором  , приложенным в этом центре, и главным моментом
, приложенным в этом центре, и главным моментом  относительно этого центра. Главный вектор равен геометрической сумме всех сил:
относительно этого центра. Главный вектор равен геометрической сумме всех сил:  и не зависит от выбора центра приведения, а главный момент равен геометрической сумме векторов-моментов всех сил относительно этого центра (включая и векторы-моменты всех пар сил) и зависит от выбора центра приведения:
и не зависит от выбора центра приведения, а главный момент равен геометрической сумме векторов-моментов всех сил относительно этого центра (включая и векторы-моменты всех пар сил) и зависит от выбора центра приведения:  .
.
Условиями равновесия произвольной пространственной системы сил являются равенство нулю главного вектора и главного момента этой системы сил относительно любого центра, что выражается шестью уравнениями в проекциях на оси декартовой системы координат: 


Вопросы для самоконтроля
1. Как определить момент силы относительно оси?
2. В каких случаях момент силы относительно оси равен нулю?
3. Как представить вектор-момент пары сил, расположенной в пространстве?
4. Как складываются пары сил в пространстве?
5. Как вычислить главный вектор и главный момент пространственной произвольной системы сил?
6. Каковы условия (уравнения) равновесия для произвольной пространственной системы сил?
Дата добавления: 2015-12-08; просмотров: 1381;